
Lesson 18 - Microscope Objectives - objective lenses of microscope function
In order to effectively use this page, you need the Flash player. The Flash player is available free from http://www.macromedia.com/.
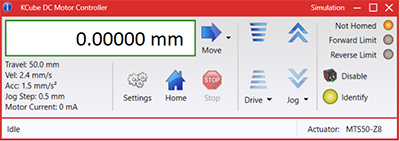
SoftwareThis stage can be operated with the user friendly Kinesis software package, which allows the user to quickly set up complex move sequences. It also features .NET controls which can be used by 3rd party developers working in the latest C#, Visual Basic, LabVIEW™ or any .NET compatible languages to create custom applications. All relevant operating parameters are set automatically by the software for Thorlabs stage and actuator products. For more details, please see the Kinesis Software and Kinesis Tutorials tabs.
You should always use the Friction Screw or its equivalent to close the rods on an object. Otherwise incorrect measurements will result!
The HDR50(/M) stage can be mounted directly to a breadboard using 1/4"-20 (M6) cap screws (not included) that are at least 1.5" (35 mm) long. It can also be mounted vertically using the holes on each side face or by using the NR360SP2 bracket sold below. The NR360SP5 adapter enables the HDR50 stage to be mounted to an LNR50 or NRT Series Translation Stage.
This document, including all figures and animations, was written by David M. Harrison, Dept. of Physics, Univ. of Toronto, mailto:harrison@physics.utoronto.ca in August 2002.
By providing this common software platform, Thorlabs has ensured that users can mix and match any of our motion control devices in a single application, while only having to learn a single set of software tools. In this way, it is perfectly feasible to combine any of the controllers from single-axis to multi-axis systems and control all from a single, PC-based unified software interface.
Motorized RotationMount
This material may be distributed only subject to the terms and conditions set forth in the Open Content License, v1.0 or later (the latest version is presently available at http://opencontent.org/opl.shtml).
Motorized RotationStage Thorlabs
Now the distance between the measuring rods is 7.500 mm. The downward line on the cylinder corresponding to 7.5 mm is barely visible.
ManualRotationStage
In the animation, as opposed to a real micrometer, we only do readings of the distance to the nearest hundredth of a millimeter.
The above diagram shows a micrometer measuring the width of a pencil. The Thimble is rotated, causing it to move right or left. It is connected to the right-hand Measuring Rod, which also moves right or left. The measured size of the pencil is the distance between the two measuring rods when they are just in contact with the sides of the pencil.
If you are a student in the Physics laboratory at the University of Toronto, the material discussed here is also covered in the Commonly Used Instruments section of the First Year Laboratory Manual. There is also a videotape on using a Micrometer and a Vernier Caliper available from the laboratory technologists.
These top plate adapters provide additional mounting features for our HDR50(/M) Rotation Stage. The plates mount to the moving world at the top of the stage using four included 8-32 (M4) screws. Note that while imperial adapters come with imperial hardware and metric adapters come with metric hardware, the plates themselves are compatible with either type of stage. For example, an imperial adapter may be attached to a metric stage using four M4 screws. These adapters are also compatible with the retired NR360S(/M) Stage.
Direct driverotationstage
Because of the mechanical advantage due to the fine pitch of the screw threads that move the thimble and the right-hand measuring rod, it is easy to use enough force in closing the rods on the object being measured to deform either the rods or the object. In the diagram you can see a Friction Screw, which applies "just enough" torque to rotate the thimble in a gentle manner.
LabVIEWLabVIEW can be used to communicate with any Kinesis-based controller via .NET controls. In LabVIEW, you build a user interface, known as a front panel, with a set of tools and objects and then add code using graphical representations of functions to control the front panel objects. The LabVIEW tutorial, provided below, provides some information on using the .NET controls to create control GUIs for Kinesis-driven devices within LabVIEW. It includes an overview with basic information about using controllers in LabVIEW and explains the setup procedure that needs to be completed before using a LabVIEW GUI to operate a device.
The diagram to the right is a close-up of the micrometer showing the thimble. The thimble rotates around a cylinder which has markings every one-half millimeter.
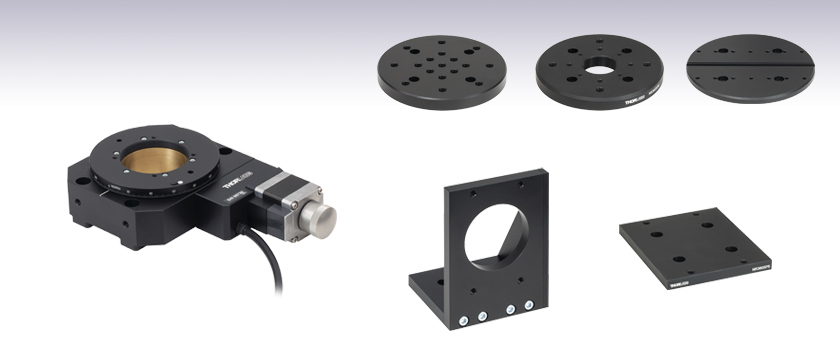
The HDR50(/M) Heavy-Duty Rotation Stage features SM2-threaded central apertures on the rotating and non-rotating worlds (illustrated in the diagram to the right). The threaded section of the rotating world is 0.27" (6.9 mm) deep and the threaded section of the non-rotating world on the bottom side is 0.16" (4.0 mm) deep. Other mounting features are available using the top plate adapters below. These adapters attach using the 8-32 (M4) tapped holes in the stage's rotating world.
The HDR50(/M) Heavy-Duty Rotation Stage provides motorized, continuous rotation and can support loads up to 50 kg (110 lbs). It incorporates a micro-stepping motor, worm gear assembly, precision bearings, and a low-profile design with a height of 44.0 mm. The central aperture features an SM2 thread on the rotating and the non-rotating parts, making the stage compatible with our SM2 lens tubes. The stage has four 1/4" (M6) countersunk holes that allow it to be secured directly to a breadboard. The holes are spaced apart such that an imperial stage may also be mounted to a metric breadboard and vice versa. The stage can also be post mounted using the six 1/4"-20 (M6) side-located mounting holes.
Motorized rotationstages
Thorlabs' Kinesis® software features new .NET controls which can be used by third-party developers working in the latest C#, Visual Basic, LabVIEW™, or any .NET compatible languages to create custom applications.
C#This programming language is designed to allow multiple programming paradigms, or languages, to be used, thus allowing for complex problems to be solved in an easy or efficient manner. It encompasses typing, imperative, declarative, functional, generic, object-oriented, and component-oriented programming. By providing functionality with this common software platform, Thorlabs has ensured that users can easily mix and match any of the Kinesis controllers in a single application, while only having to learn a single set of software tools. In this way, it is perfectly feasible to combine any of the controllers from the low-powered, single-axis to the high-powered, multi-axis systems and control all from a single, PC-based unified software interface.The Kinesis System Software allows two methods of usage: graphical user interface (GUI) utilities for direct interaction and control of the controllers 'out of the box', and a set of programming interfaces that allow custom-integrated positioning and alignment solutions to be easily programmed in the development language of choice.
In this case, then, the distance between the measuring rods is 7.000 mm. The upward line on the cylinder corresponding to 7 mm is barely visible under the thimble.
Thorlabs'RotationStage
There is an animation of reading the micrometer. You may access the animation by clicking on the red button to the right. It will appear in a separate window, and has a file size of 31k.
Motorized RotationMount optics
Thorlabs offers the Kinesis® software package to drive our wide range of motion controllers. The software can be used to control devices in the Kinesis family, which covers a wide variety of motion controllers ranging from small, low-powered, single-channel drivers (such as the K-Cubes™) to high-power, multi-channel benchtop units and modular 19" rack nanopositioning systems (the MMR60x Rack System).
The NR360SP5(/M) mounting adapter allows the HDR50(/M) stage or the retired NR360S(/M) stage to be mounted on top of an LNR50 Series Stage, NRT100 Stage, or an NRT150 Stage, as shown in the photo to the right. This adapter requires four 1/4"-20 (M6), 3/8" (10 mm) long cap screws and four 1/4"-20 (M6), 1.5" (35 mm) long cap screws (not included).
The left-hand side of the thimble has markings all around it. The line labelled 0 is the primary pointer. When it lines up with the central horizontal line on the cylinder, as shown, then the distance between the measuring rods is exactly an integral or half-integral number of millimeters.
The NR360SP2(/M) vertical mounting bracket allows the HDR50(/M) stage or the retired NR360S(/M) stage to be mounted in a vertical orientation. The Ø2.68" bore allows an SM2 lens tube attached to the bottom of the stage to pass through the bracket. The bracket can be secured to an optical table or optical breadboard using an array of seven 1/4" (M6) counterbored holes. Mounting the HDR50(/M) stage to the bracket requires four 1/4"-20 (M6) cap screws (not included) that are at least 1.5" (35 mm) long.
AccessoriesWe offer several types of top plate adapters which mount to the rotating world of the HDR50(/M) stage using 8-32 (M4) screws. We also offer two mounting adapters: the NR360SP2 bracket is designed for secure vertical mounting of the stage and the NR360SP5 adapter enables the HDR50 rotation stage to be mounted to select translation stages.
NewportRotationStage
Depending on your eyes and screen resolution, you might be fairly confident that the reading is less than, say, 8.627 mm and similarly confident that it is greater than 8.621 mm. Thus you might assign a Reading Error to this measurement of 0.003 mm
The Kinesis Software features .NET controls which can be used by 3rd party developers working in the latest C#, Visual Basic, LabVIEW™, or any .NET compatible languages to create custom applications. Low-level DLL libraries are included for applications not expected to use the .NET framework and APIs are included with each install. A Central Sequence Manager supports integration and synchronization of all Thorlabs motion control hardware.
The software package allows two methods of usage: graphical user interface (GUI) utilities for direct interaction with and control of the controllers 'out of the box', and a set of programming interfaces that allow custom-integrated positioning and alignment solutions to be easily programmed in the development language of choice.
Thorlabs offers a wide variety of manual and motorized rotation mounts and stages. Rotation mounts are designed with an inner bore to mount a Ø1/2", Ø1", or Ø2" optic, while rotation stages are designed with mounting taps to attach a variety of components or systems. Motorized options are powered by a DC Servo motor, 2 phase stepper motor, piezo inertia motor, or an Elliptec™ resonant piezo motor. Each offers 360° of continuous rotation.
Now the distance is greater than 8.620 mm, but clearly less than 8.630 mm. We might estimate this reading to be 8.624 mm.
Depending on your eyes and the particular micrometer that you use, assigning a Reading Error of ± 0.003 mm is probably reasonable. This is 3 micro-meters!
For a collection of example projects that can be compiled and run to demonstrate the different ways in which developers can build on the Kinesis motion control libraries, click on the links below. Please note that a separate integrated development environment (IDE) (e.g., Microsoft Visual Studio) will be required to execute the Quick Start examples. The C# example projects can be executed using the included .NET controls in the Kinesis software package (see the Kinesis Software tab for details).
A micrometer allows a measurement of the size of a body. It is one of the most accurate mechanical devices in common use. This document introduces this instrument.
Note that this is all consistent with the fact that the markings on the cylinder correspond to fifty divisions for a complete revolution. Thus the numbers on the thimble correspond to hundredths of a millimeter.



 Ms.Cici
Ms.Cici 
 8618319014500
8618319014500