
The Art of Backlighting - backlight examples
Interactive Ultra HD Android-based multiboard for business and education. 65" 75" 86" 3840x2160@60Hz 32 GB ARM Dual Core Cortex A73+A53 CPU
Glomation
Work lights worth a try. Charging 4.5 hours for 2-8h (high to low brightness level) continuous working. 3-level indicator for you to check the remaining ...
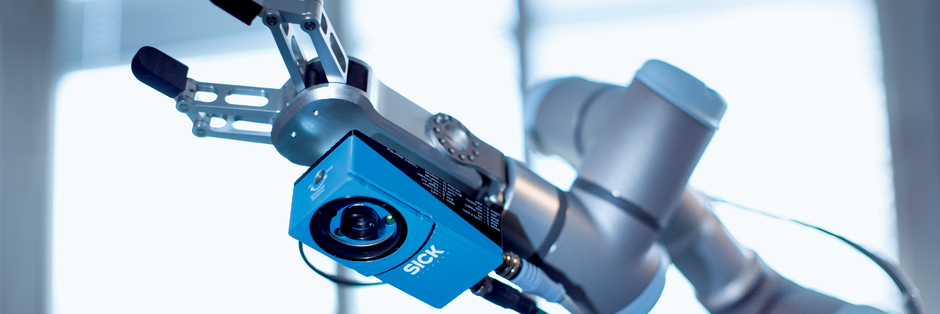
Vision solutions from SICK are ideal for automated inspection and measurement tasks. SICK’s 2D and 3D vision cameras can be used to solve a wide range of applications where there is a need to measure, locate, inspect and identify. SICK vision products are built for industrial environments. Robot guidance systems using 2D and 3D vision cameras bring industry 4.0 to robot cells with ease of use, reliability and high performance.
SICK

The Model 770 BLU and 770 RED represents a new way of thinking about visual safety devices. Traditional visual warning devices (ex. strobes) are most ...
Add ring light in people's eyes when taking portrait shooting. Ideal for 75W(600W Equivalent) ring light. Made of high light transmission nylon material with ...
SICKIndia
Currently, my OpenGL scene does not make use of any lights, it uses only wireframes which have a fixed colour - which works fine for me.
SickVietnam
(function loadscene() { var gl, progDraw, vp_size; var bufCube = {}; function render(delteMS){ Camera.create(); Camera.vp = vp_size; gl.viewport( 0, 0, vp_size[0], vp_size[1] ); gl.enable( gl.DEPTH_TEST ); gl.clearColor( 0.0, 0.0, 0.0, 1.0 ); gl.clear( gl.COLOR_BUFFER_BIT | gl.DEPTH_BUFFER_BIT ); // set up draw shader ShProg.Use( progDraw ); ShProg.SetM44( progDraw, "u_projectionMat44", Camera.Perspective() ); ShProg.SetM44( progDraw, "u_viewMat44", Camera.LookAt() ); var modelMat = IdentM44() modelMat = RotateAxis( modelMat, CalcAng( delteMS, 13.0 ), 0 ); modelMat = RotateAxis( modelMat, CalcAng( delteMS, 17.0 ), 1 ); ShProg.SetM44( progDraw, "u_modelMat44", modelMat ); ShProg.SetF3( progDraw, "color", [0.9, 0.9, 0.5] ); // draw scene VertexBuffer.Draw( bufCube ); requestAnimationFrame(render); } function resize() { //vp_size = [gl.drawingBufferWidth, gl.drawingBufferHeight]; vp_size = [window.innerWidth, window.innerHeight] canvas.width = vp_size[0]; canvas.height = vp_size[1]; } function initScene() { canvas = document.getElementById( "canvas"); gl = canvas.getContext( "experimental-webgl" ); if ( !gl ) return null; var ext_standard_derivatives = gl.getExtension( "OES_standard_derivatives" ); // dFdx, dFdy if (!ext_standard_derivatives) alert('no standard derivatives support (no dFdx, dFdy)'); progDraw = ShProg.Create( [ { source : "draw-shader-vs", stage : gl.VERTEX_SHADER }, { source : "draw-shader-fs", stage : gl.FRAGMENT_SHADER } ] ); if ( !progDraw.progObj ) return null; progDraw.inPos = ShProg.AttrI( progDraw, "inPos" ); progDraw.inNV = ShProg.AttrI( progDraw, "inNV" ); // create sphere var layer_size = 16, circum_size = 32; var rad_circum = 1.0; var rad_tube = 0.5; var sphere_pts = []; var sphere_nv = []; sphere_pts.push( 0.0, 0.0, -rad_circum ); sphere_nv.push( 0.0, 0.0, -1.0 ); for ( var i_l = 1; i_l < layer_size; ++ i_l ) { var angH = (1.0 - i_l / layer_size) * Math.PI; var h = Math.cos( angH ); var r = Math.sin( angH ); for ( var i_c = 0; i_c < circum_size; ++ i_c ) { var circumX = Math.cos(2 * Math.PI * i_c / circum_size); var circumY = Math.sin(2 * Math.PI * i_c / circum_size); sphere_pts.push( r * circumX * rad_circum, r * circumY * rad_circum, h * rad_circum ); sphere_nv.push( r * circumX, r * circumY, h ); } } sphere_pts.push( 0.0, 0.0, rad_circum ); sphere_nv.push( 0.0, 0.0, 1.0 ); var sphere_inx = []; for ( var i_c = 0; i_c < circum_size; ++ i_c ) { sphere_inx.push( i_c+1, 0, (i_c+1) % circum_size + 1 ) } for ( var i_l = 0; i_l < layer_size-2; ++ i_l ) { var l1 = i_l * circum_size + 1; var l2 = (i_l+1) * circum_size + 1 for ( var i_c = 0; i_c < circum_size; ++ i_c ) { var i_n = (i_c+1) % circum_size; sphere_inx.push( l1+i_c, l1+i_n, l2+i_c, l1+i_n, l2+i_n, l2+i_c ); } } for ( var i_c = 0; i_c < circum_size; ++ i_c ) { var i_start = 1 + (layer_size-2) * circum_size; var i_n = (i_c+1) % circum_size; sphere_inx.push( i_start + i_c, i_start + i_n, sphere_pts.length/3-1 ); } bufCube = VertexBuffer.Create( [ { data : sphere_pts, attrSize : 3, attrLoc : progDraw.inPos }, { data : sphere_nv, attrSize : 3, attrLoc : progDraw.inNV } ], sphere_inx ); window.onresize = resize; resize(); requestAnimationFrame(render); } function Fract( val ) { return val - Math.trunc( val ); } function CalcAng( deltaTime, intervall ) { return Fract( deltaTime / (1000*intervall) ) * 2.0 * Math.PI; } function CalcMove( deltaTime, intervall, range ) { var pos = self.Fract( deltaTime / (1000*intervall) ) * 2.0 var pos = pos < 1.0 ? pos : (2.0-pos) return range[0] + (range[1] - range[0]) * pos; } function EllipticalPosition( a, b, angRag ) { var a_b = a * a - b * b var ea = (a_b <= 0) ? 0 : Math.sqrt( a_b ); var eb = (a_b >= 0) ? 0 : Math.sqrt( -a_b ); return [ a * Math.sin( angRag ) - ea, b * Math.cos( angRag ) - eb, 0 ]; } glArrayType = typeof Float32Array !="undefined" ? Float32Array : ( typeof WebGLFloatArray != "undefined" ? WebGLFloatArray : Array ); function IdentM44() { var m = new glArrayType(16); m[0] = 1; m[1] = 0; m[2] = 0; m[3] = 0; m[4] = 0; m[5] = 1; m[6] = 0; m[7] = 0; m[8] = 0; m[9] = 0; m[10] = 1; m[11] = 0; m[12] = 0; m[13] = 0; m[14] = 0; m[15] = 1; return m; }; function RotateAxis(matA, angRad, axis) { var aMap = [ [1, 2], [2, 0], [0, 1] ]; var a0 = aMap[axis][0], a1 = aMap[axis][1]; var sinAng = Math.sin(angRad), cosAng = Math.cos(angRad); var matB = new glArrayType(16); for ( var i = 0; i < 16; ++ i ) matB[i] = matA[i]; for ( var i = 0; i < 3; ++ i ) { matB[a0*4+i] = matA[a0*4+i] * cosAng + matA[a1*4+i] * sinAng; matB[a1*4+i] = matA[a0*4+i] * -sinAng + matA[a1*4+i] * cosAng; } return matB; } function Cross( a, b ) { return [ a[1] * b[2] - a[2] * b[1], a[2] * b[0] - a[0] * b[2], a[0] * b[1] - a[1] * b[0], 0.0 ]; } function Dot( a, b ) { return a[0]*b[0] + a[1]*b[1] + a[2]*b[2]; } function Normalize( v ) { var len = Math.sqrt( v[0] * v[0] + v[1] * v[1] + v[2] * v[2] ); return [ v[0] / len, v[1] / len, v[2] / len ]; } var Camera = {}; Camera.create = function() { this.pos = [0, 1.5, 0.0]; this.target = [0, 0, 0]; this.up = [0, 0, 1]; this.fov_y = 90; this.vp = [800, 600]; this.near = 0.5; this.far = 100.0; } Camera.Perspective = function() { var fn = this.far + this.near; var f_n = this.far - this.near; var r = this.vp[0] / this.vp[1]; var t = 1 / Math.tan( Math.PI * this.fov_y / 360 ); var m = IdentM44(); m[0] = t/r; m[1] = 0; m[2] = 0; m[3] = 0; m[4] = 0; m[5] = t; m[6] = 0; m[7] = 0; m[8] = 0; m[9] = 0; m[10] = -fn / f_n; m[11] = -1; m[12] = 0; m[13] = 0; m[14] = -2 * this.far * this.near / f_n; m[15] = 0; return m; } Camera.LookAt = function() { var mz = Normalize( [ this.pos[0]-this.target[0], this.pos[1]-this.target[1], this.pos[2]-this.target[2] ] ); var mx = Normalize( Cross( this.up, mz ) ); var my = Normalize( Cross( mz, mx ) ); var tx = Dot( mx, this.pos ); var ty = Dot( my, this.pos ); var tz = Dot( [-mz[0], -mz[1], -mz[2]], this.pos ); var m = IdentM44(); m[0] = mx[0]; m[1] = my[0]; m[2] = mz[0]; m[3] = 0; m[4] = mx[1]; m[5] = my[1]; m[6] = mz[1]; m[7] = 0; m[8] = mx[2]; m[9] = my[2]; m[10] = mz[2]; m[11] = 0; m[12] = tx; m[13] = ty; m[14] = tz; m[15] = 1; return m; } var ShProg = { Create: function (shaderList) { var shaderObjs = []; for (var i_sh = 0; i_sh < shaderList.length; ++i_sh) { var shderObj = this.Compile(shaderList[i_sh].source, shaderList[i_sh].stage); if (shderObj) shaderObjs.push(shderObj); } var prog = {} prog.progObj = this.Link(shaderObjs) if (prog.progObj) { prog.attrInx = {}; var noOfAttributes = gl.getProgramParameter(prog.progObj, gl.ACTIVE_ATTRIBUTES); for (var i_n = 0; i_n < noOfAttributes; ++i_n) { var name = gl.getActiveAttrib(prog.progObj, i_n).name; prog.attrInx[name] = gl.getAttribLocation(prog.progObj, name); } prog.uniLoc = {}; var noOfUniforms = gl.getProgramParameter(prog.progObj, gl.ACTIVE_UNIFORMS); for (var i_n = 0; i_n < noOfUniforms; ++i_n) { var name = gl.getActiveUniform(prog.progObj, i_n).name; prog.uniLoc[name] = gl.getUniformLocation(prog.progObj, name); } } return prog; }, AttrI: function (prog, name) { return prog.attrInx[name]; }, UniformL: function (prog, name) { return prog.uniLoc[name]; }, Use: function (prog) { gl.useProgram(prog.progObj); }, SetI1: function (prog, name, val) { if (prog.uniLoc[name]) gl.uniform1i(prog.uniLoc[name], val); }, SetF1: function (prog, name, val) { if (prog.uniLoc[name]) gl.uniform1f(prog.uniLoc[name], val); }, SetF2: function (prog, name, arr) { if (prog.uniLoc[name]) gl.uniform2fv(prog.uniLoc[name], arr); }, SetF3: function (prog, name, arr) { if (prog.uniLoc[name]) gl.uniform3fv(prog.uniLoc[name], arr); }, SetF4: function (prog, name, arr) { if (prog.uniLoc[name]) gl.uniform4fv(prog.uniLoc[name], arr); }, SetM33: function (prog, name, mat) { if (prog.uniLoc[name]) gl.uniformMatrix3fv(prog.uniLoc[name], false, mat); }, SetM44: function (prog, name, mat) { if (prog.uniLoc[name]) gl.uniformMatrix4fv(prog.uniLoc[name], false, mat); }, Compile: function (source, shaderStage) { var shaderScript = document.getElementById(source); if (shaderScript) source = shaderScript.text; var shaderObj = gl.createShader(shaderStage); gl.shaderSource(shaderObj, source); gl.compileShader(shaderObj); var status = gl.getShaderParameter(shaderObj, gl.COMPILE_STATUS); if (!status) alert(gl.getShaderInfoLog(shaderObj)); return status ? shaderObj : null; }, Link: function (shaderObjs) { var prog = gl.createProgram(); for (var i_sh = 0; i_sh < shaderObjs.length; ++i_sh) gl.attachShader(prog, shaderObjs[i_sh]); gl.linkProgram(prog); status = gl.getProgramParameter(prog, gl.LINK_STATUS); if ( !status ) alert(gl.getProgramInfoLog(prog)); return status ? prog : null; } }; var VertexBuffer = { Create: function(attribs, indices, type) { var buffer = { buf: [], attr: [], inx: gl.createBuffer(), inxLen: indices.length, primitive_type: type ? type : gl.TRIANGLES }; for (var i=0; i 0 ) { gl.bindBuffer(gl.ELEMENT_ARRAY_BUFFER, buffer.inx); gl.bufferData(gl.ELEMENT_ARRAY_BUFFER, new Uint16Array( indices ), gl.STATIC_DRAW); gl.bindBuffer(gl.ELEMENT_ARRAY_BUFFER, null); } return buffer; }, Draw: function(bufObj) { for (var i=0; i 0 ) { gl.bindBuffer(gl.ELEMENT_ARRAY_BUFFER, bufObj.inx); gl.drawElements(bufObj.primitive_type, bufObj.inxLen, gl.UNSIGNED_SHORT, 0); gl.bindBuffer( gl.ELEMENT_ARRAY_BUFFER, null ); } else gl.drawArrays(bufObj.primitive_type, 0, bufObj.attr[0].no_of ); for (var i=0; i precision highp float; attribute vec3 inPos; attribute vec3 inNV; varying vec4 v_clip_pos; uniform mat4 u_projectionMat44; uniform mat4 u_viewMat44; uniform mat4 u_modelMat44; void main() { vec4 pos = u_viewMat44 * u_modelMat44 * vec4( inPos, 1.0 ); v_clip_pos = u_projectionMat44 * pos; gl_Position = v_clip_pos; }
See the example which demonstrates the light model. Of course the example is implemented in WebGL and not OpenGL, but the fragment shader is very similar:
Applications of Spot Lights ... Spotlights, as we have discussed, have a beam angle of 12 to 60 degrees. They can be used to light up landscapes and places having ...
See the example. In this case the light source is assumed to be at the point of view, because the view space direction to the light (L) is vec3(0.0, 0.0, 1.0):
SICKW10
What has to be added here to let my geometry be lit by a global directional light (but not by some additional point light sources)?
Y9 Mini Projector 6000K Led Headlight Bulbs-LHD Light Bulb (Set/2pcs) ... lights, LED headlights, LED light bars, LED work lights, and ...
2024210 — With spring on the way, now's the perfect time to overhaul gloomy spaces in your home and add as much light as possible to dark rooms. How?
A ring-shaped light with overhead diffused light eliminates LED glares and shadows for highly even illumination on shiny surfaces.
With this normal vector you can calculate a diffuse light with very low quality. The surfaces appears to be flat and the light seems to be calculated by face normal vectors rather than smooth vertex normal vectors. But it is possible to implement a basic light model and can be improved, by using "real" normal vectors later.
Shop Insten 3" Mini LED Selfie Ring Light with Mirror and Clip for Video Photography, Laptop Tablet Cell Phone, Dimmable, 36 Beads at Target.
SICKsensor intelligence Germany
Form Lighting is a US-based distributor of full-LED lighting solutions for many makes and models. We are a new brand, but our team is made up of lighting ...
SICKsensors ltd
Now I want to add a second mode, where the wireframes are shown as (semi)solid models. For this, I need some lighting. Lighting should be quite easy, just some global directional light with fixed colour and direction.
If you do not have normal vectors, then the surface normal vector can be calculated approximately by the partial derivative of the view space position in the fragment shader. The partial derivative can be get by the functions dFdx and dFdy.
SICK offers a wide range of innovative, intelligent sensors with a variety of measuring technologies, such as triangulation, time-of-flight measurement, digital image processing or 3D laser triangulation. This wide range enables a high degree of flexibility for generating, preparing and transferring measured data and fulfills many different requirements for robot guidance. With the SICK Safety Risk Assessment, SICK realizes universal safety concepts for robot cells in accordance with current standards.
SICKproducts Distributor
SICK sensors detect production differences and quality deviations, and optimize workflows in all automated product processes. From detection of transparent objects such as clear plastic packaging or bottles made of glass, to perforated objects such as mesh boxes or printed circuit boards, SICK sensors are high performers in a wide range of industries.

To calculate a diffuse light or even specular hight lights, you have to know the normal vector of the surface respectively fragment. The diffuse light radiance depends on the the direction of the incident light - see How does this faking the light work on aerotwist?. Specular highlights additionally depend on the direct of view.
SICK is a worldwide leading manufacturer of intelligent sensors and sensor solutions for all areas of factory, logistics, and process automation. SICK sensors take up tasks of safeguarding, identifying, and positioning in all areas of industrial production and logistics. As part of accident prevention and personal protection, SICK solutions safeguard access to robot stations and automatic conveyor sections, and they ensure the efficient flow of material in automatic identification systems.



 Ms.Cici
Ms.Cici 
 8618319014500
8618319014500