
What Makes the Best Anti-Reflective Coatings - antireflection coating
The continuous need for miniaturization in industry and research requires smaller precision motorized rotation stages for many alignment applications in optics, photonics and medical design.
The smallest motorized stages offered are the finger-tip-sized, inertia motor-driven Q-Motion positioners. For the highest performance, the flexure guided PIhera series is recommended.
4K resolutionvs 1080p
What happened to 2.7k? Action cameras, such as the DJI Osmo series, GoPro, and possibly others, they also output 2.7k 16:9.

Micropositioners with stepper motors and linear motors and lead-screw or ball-screw drives are often employed when relatively high forces are required, speed requirements are moderate, and controls need to be simple.
Applications for this positioner are in precision automation, metrology, photonics alignment, optics positioning, and scanning. The non-contact design avoids particle generation and makes these PIglide air bearing stages ideal for cleanroom applications.
4k widescreen resolutiongaming
The M-122 is a compact, high precision linear stage with integrated linear encoder, providing 100 nanometers resolution. It is a bit larger than the M-112, 25mm stage (with motor/gearhead combination), but provides higher speed and precision. Cross roller bearings with anti creep cage assist replace the linear ball bearings in the M-11x stage series.
The V-52x series of voice-coil-driven linear stages come in 3 sizes and provide high-dynamics over travel ranges of 5mm, 10mm, and 20mm. Applications include optics scanning, fiber alignment, biotechnology, and laser technology. These compact linear scanning stages achieve significantly higher dynamics and speed than conventional screw-type positioners with stepper and servo motors; scanning frequencies of several 10Hz with velocities up to 250mm/sec can be achieved with the recommended C-413 compact controller. The design uses no moving cables and the frictionless voice-coil drive is not subject to wear & tear and generates no particles.
Scroll down to view each format and aspect ratio combination – starting with 12K resolution at the top and moving down to standard definition at the bottom. I’ve also included some common social media formats at the very end too.
Wear and Friction Free Bearings, No Particle Generation Flexures and air bearings provide friction free and wear free precision guidance.
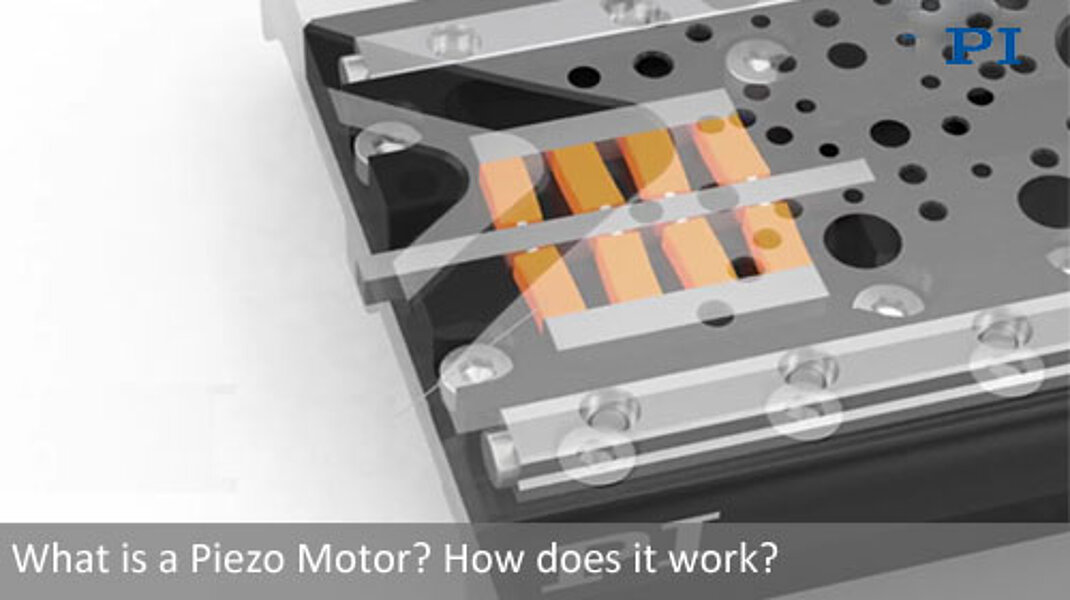
Ultrasonic motor direct drives are based on the piezo effect. A compact piezoceramic actuator is driven at inaudible frequencies of 100’s of kHz (hence the ultrasonic designation), and with each cycle transfers nanoscopic motion to a linear or rotary ceramic surface bonded to a linear runner or rotary platform. Ultrasonic motors provide very fast start/stop behavior, smooth motion with a very wide dynamic range from microns/second to 100’s of millimeters/second.
I guess what I’m saying is that this chart is nice but it’s also kind of divorced from some best practices that could save a lot of time and aggravation over the course of a project. Also—as other folks have said—there are a lot of aspect ratios included here that I can’t imagine working with, but I will definitely concede that aspect ratio is more of a creative decision. Still, I can’t imagine working in 2.35, 2.37, 2.40, or 2.44 when 2.39:1 is the cinematic standard and yields functionally the same frame as those other aspect ratios.
Motorized miniature linear stages and miniature rotary stages (often referred to as micropositioners) are offered in a variety of designs, each optimized for a range of specific applications. When the highest dynamic performance and travel ranges in the centimeter range is required, along with continuous scanning operation, motorized miniature stages with voice-coil drives are often a good starting point. Longer travel ranges, higher forces, and even higher velocities are achievable with closed-loop 3-phase linear motor stages. Ultrasonic direct-drive piezo motor linear stages and rotary stages also provide very high speed and acceleration, and their inherently self-clamping design is an advantage in applications that require dynamics and high stability over longer periods with no heat generation. More traditional approaches are based on lead-screw and ball-screw drives with stepper motors or closed-loop servo motors. When nanometer and sub-nanometer performance is paramount, piezo flexure stages are hard to beat. Independent of the use case, compact, high precision positioning stages are crucial for the miniaturization process in cutting-edge research and industrial applications, such as test & measurement, optical and opto-mechanical alignment, photonics automation and component assembly. PI provides the largest portfolio of motorized miniature linear stages and rotary tables, including high-speed electromagnetic linear motors, economical stepper motor units, and ultra-compact piezo motor positioners, all available from single axis to multi-axis systems.
8Kresolution
Piezo flexure stages are used when extremely smooth motion, fast response, high force or continuous scanning is required, with travel ranges typically below 1 millimeter. PI flexure stages are driven with PI’s exclusive PICMA piezo elements that have been life tested for 100 billion cycles and were selected by NASA /JPL for the Mars mission due to their extremely high performance and reliability.
A hexapod is based on a 6-axis (XYZ, Pitch, Roll, Yaw) actuator system arranged between a top and bottom platform. Hexapods are also referred to as Gough-Stewart platforms and offer many advantages over serial kinematics stages, such as lower inertia, improved dynamics, smaller package size, and higher stiffness. In addition, hexapods are more flexible than conventional 6 axis positioners.
These highly engineered motorized micropositioners are available in different sizes and motion ranges. Most models can easily be combined to form X-Y micropositioners (see graphic below). PI offers open and closed-loop micropositioning stages with precision ranges from 1 micron to sub-nanometer resolution. The selection includes linear positioners and rotary tables, single-axis and multi-axis stage assemblies, for ambient and vacuum environments, custom designs and non-magnetic motorized stages are also available.
Huge thanks to Wes of Firehouse Creative for putting much of this together, and allowing me to share it with all of you here.
4Kultrawide monitor
The Q-521 is the smallest linear stage currently available from PI. Based on the stick-slip motor principle, it boasts dimensions as small as 21×30×10mm. Open and closed-loop versions are available. Two linear encoder options for 1 and 4 namometer resolution are offered, both integrated in the stage body, for minimized dimension.
Electromagnetic linear motor-driven stages are used in high-speed positioning, scanning, and automation applications. They have lower holding forces compared to classical motor /screw driven stages, but no wear in the drive train, and are ideal for fast, high-duty cycle motion and positioning applications. .
Piezo inertia motors can be operated in open loop, but for high accuracy and repeatability, a position encoder is integrated in the stage. Vacuum compatible and non-magnetic versions are also offered. The PIShift piezo inertia drive is very quiet, due to its high operating frequency of 20 kHz.
Stick-slip piezo motors (inertia motors) permit the design of the smallest class of precision motorized positioners. The direct drive motors are only a few millimeters in size, there are no gears, or other conventional power transmission components involved that add size, complexity, play or backlash.
The motors offer multiple operating modes including a high-dynamics, short-range dither mode with 100’s of Hertz bandwidth and picometer resolution, and several long distance modes optimized for highest force, highest speed, and constant velocity.
Noam Kroll is an award-winning Los Angeles based filmmaker, and the founder of the boutique production house, Creative Rebellion. His work can be seen at international film festivals, on network television, and in various publications across the globe. Follow Noam on Twitter, Instagram and Facebook for more content like this!
Below, you will find a detailed aspect ratio and resolution guide. Among other things, you can use it to help identify which resolution to use in post-production when setting up a new project or timeline.
4k widescreen resolutionreddit
The new L-505 is available in many configurations with linear encoders down to 5 nm resolution. It provides a very good balance of cost and precision.
Piezo flexure-guided positioning stages provide several advantages over classical motorized positioning systems with mechanical bearings. They are completely free of backlash and friction and can position and settle in milliseconds or even microseconds. Driven by a piezo ceramic (with optional flexure motion amplifier), the response time is based on the sound propagation in the ceramics.
Now if only there could be some agreement to what aspect ratios are “necessary” and/or “normal?” Do we really need 2.35, 2.37, 2.39, 2.40, 2.45? 1.78, 1.85, 1.90, 2.0?
The V-408 features high load capacity precision crossed roller elements with anti-creep cage assist, preventing roller creep, and a zero-wear, non-contact linear motor – ideal prerequisites for long lifetime in high duty cycle industrial applications. The high-force linear motor achieves velocities up to 0.7m/sec. An integrated optical linear encoder provides 10 nanometers resolution. The stage achieves 20nm minimum incremental motion and excellent geometric performance with 4µm straightness and flatness.
PiezoWalk is a more powerful and complex drive than stick-slip and ultrasonic motors. PiezoWalk motors combine long travel with high stiffness and force, providing virtually unlimited travel ranges. PI’s NEXACT® motor technology integrates these advantages into a small package. Piezo-class resolution, millisecond responsiveness with low operating voltages, and a self-clamping design are other features.
Compliance with Applicable Laws; Export Control Laws User access to this website is governed by all applicable federal, state, and local laws. All information available on this website is subject to U.S. export control laws and may also be subject to the laws of the country where you reside.
Folded Drive Trains: M-11x and M-12x Stages are especially compact through the use of a folded drive train. The M-110, M-111 and M-112 series is PI’s smallest positioning stage family with “classical” motor drives. It is offered with lead screws (higher resolution and holding force) and ball screws (higher speed, lower friction). The DC-servo motor versions come with motor mounted encoders (calculated resolution as low as 7 nanometers); the stepper motor driven versions are run open loop. Guidance is with linear ball bearings. X, XY, and XYZ combinations are available.
Custom Stages for OEMs: Since one design can NOT fit all applications, please contact a PI engineer and they will work with you on the best standard or custom solution for your motion application.
The A-141 miniature Air Bearing Linear Stage is equipped with a 3-phase motor, fully preloaded air bearings, and an integral high-resolution optical linear encoder. A locking design provides the ultimate in position stability. This stage offers ultra-precision in a very compact package.
I don’t wanna bag on these charts because clearly a lot of energy went in to making them but there are a few things that really stick out to me.
The L-306 precision vertical stage can be combined with the L-406 linear stage to form compact XZ or XYZ positioning systems.
There are of course many other reasons you may need to reference this document, so feel free to bookmark the page for future use.
2Kresolution
Ultrasonic motors are self-clamping at rest, provide excellent long-term stability, there is no servo dither, or energy consumption once a position has been reached. While high velocities can be achieved with ultrasonic motors, when continuous scanning is required, magnetic linear motors and voice-coil drives, such as in the V-522 miniature stage, are recommended. Ultrasonic drives permit the design of very compact positioners; the motor design is intrinsically non-magnetic and vacuum compatible.
The Q-545 mini positioning stage is driven by a higher force stick slip motor, based on a slightly different design compared to the Q-521 stage. A linear encoder is integrated for nanometer-scale precision. The piezo inertia drive runs at inaudible frequencies and is self-clamping at rest with position holding forces around 2 lbs.
The U-521 is the smallest member of the ultrasonic miniature stage family. It is designed for fast, quiet motion and positioning applications with high resolution and excellent step and settle behavior. Equipped with direct position feedback, two versions are offered; a lower-cost 0.4 micron linear encoder and 0.1 micron version for higher precision applications.
PI offers micropositioners with lead screws (typically higher resolution and holding forces) and ball screws (higher speed, lower friction). Both are available with closed-loop servo motors and stepper motors.
Voice Coil Actuators use a one-phase electromagnetic linear motor similar to the driver of a loud-speaker. They provide high velocity with zero wear and motion ranges typically up to 1 inch.
These compact motorized rotation stages provide unlimited rotation ranges. The use of a worm gear reduction mechanism converts high speed input from the servo or stepper motor into high resolution motion at the turn table. Open loop stepper/gear motor and closed-loop servo gear motor versions with motor shaft mounted encoders are available.
4K resolutionin pixels
For example – if you want to master your project to 2.39:1 aspect ratio in 4K, you can use this guide to find the correct resolution settings: 4096 x 1716
The A-142 is our smallest motorized Air Bearing Linear Stage. It is driven by a voice coil motor and equipped with a high-resolution optical linear encoder. A brake and air springs can be added for vertical applications.
These ultrasonic motor driven rotation stages provide high velocity to 720°/second and compact dimensions. They are equipped with optical, direct metrology encoders, and due to the self-clamping motor design, boast excellent position stability. The U-628 is the largest example featuring a table diameter of just under 2”. With Ø30mm and Ø20mm, respectively, the U-624 and U-622 are even more compact versions of the U-628 rotary stage.
In addition to hexapods, PI offers a second class of planar 6-axis parallel manipulators. These piezo motor driven units are even smaller and fit inside the palm of a hand.
4K resolution
1st is that if you’re still working in standard definition then you’re not working with square pixels. The pixel aspect ratio is going to be different depending on whether or not you’re mastering for NTSC or PAL, and also anamorphic widescreen or 1.33:1. Kind of a nitpick because I doubt anyone is really setting up their main timeline in standard definition anymore, but worth keeping in mind.
2nd, I would say is that it seems unwise to use a chart like this to dictate your project’s resolution instead of basing it off of your acquisition specs. As an example, let’s say I’m shooting with an Ursa 12K and I want to frame for and generate a 4:3/1.33:1 master. Using this chart, I would want to set my project’s resolution to 12288 x 9216, right? Well, the problem there is that the Ursa 12K’s sensor isn’t able to acquire in that resolution. Its full frame acquisition format is 12288 x 6480, so if I set the project’s resolution to 12288 x 9216 then I would have to crop and scale the 4:3 centre of the Ursa’s sensor to fit that resolution. That doesn’t really add detail though, and it would add a ton of computational overhead and storage bloat, so it would make a lot more sense for the “12K 1.33:1” preset to be something around 8618×6480—the 1.33:1 crop from the 12288×6480 sensor.
Inertia piezo motors make use of the difference in the static and dynamic friction coefficients between two surfaces; their controllers provide a quasi sawtooth output voltage, with a slow expansion phase and a fast contraction phase. In the expansion phase, the piezo actuator moves the slider; in the contraction phase, its inertia prevents the slider from following the quick motion of the actuator, and it remains at its position.



 Ms.Cici
Ms.Cici 
 8618319014500
8618319014500