
What is DLC, Also Known as Diamond-Like-Carbon Coating? - diamond-like carbon coating
Plastic versus glass lenses: Protective eye glasses typically are available with plastic lenses. Plastic lenses are light weight and can be molded into comfortable shapes. However, care is needed because they can be affected by heat, and/or UV radiation which can darken the lens or decrease its ability to absorb laser energy.
What are the 3types oflasers
Although every effort is made to ensure the accuracy, currency and completeness of the information, CCOHS does not guarantee, warrant, represent or undertake that the information provided is correct, accurate or current. CCOHS is not liable for any loss, claim, or demand arising directly or indirectly from any use or reliance upon the information.
Protective clothing (gown, cap, mask), gloves, and safety eye wear may be required for working near a laser. Consult manufacturer's operating procedures and check with the laser safety officer to determine the specific needs for personal protective equipment and clothing.
This method is the simplest, but wonât give the best result. For those users familiar with tuning the old PID controllers, the RLL2SRV_P, RLL2SRV_I and RLL2SRV_D gains have the same effect, but there are some additional values that can be set by more advanced users.
The default values for the roll and pitch controllers in Plane are quite deliberately too small for most aircraft. This is because small values will cause ArduPilot to not navigate well and be sluggish, but are less likely to cause the aircraft to crash. The pitch defaults also have a large âIâ gain, to try to compensate for poor initial CG location. Once trimmed via SERVO_AUTO_TRIM, this value should be set to 1/5th of the âPâ gain and full tuning done, as instructed below.
Select the tuning box on the bottom of the Mission Planners Flight Data page. You should get a scrolling black window above the map. Double click in the black window and you should get a list of parameters to plot. Change the selection until you have the roll and nav_roll plotted. Nav_roll is the demand and roll is the response. You can use this to look for overshoot and other behaviour that isnât so obvious from the ground looking at the model.
Types of laserwith example
WARNING : If PTCH2SRV_IMAX is set too high, then there is a danger that in FBW-A, if the model has been leveled so that zero pitch is too nose-up to glide at a safe speed, that the integrator will continue to keep increasing the elevator to maintain the demanded pitch angle until the model stalls. PTCH2SRV_IMAX should be set to a value that is big enough to allow from trim changes, but small enough so that it cannot stall the plane. The default for Plane is 2/3 of total throw, which could produce this problem. Be sure that STAB_PITCH_DOWN is setup to add negative pitch at low throttle in stablized modes.
The potential for skin damage depends on the type of laser, power of the laser beam, and the duration of exposure. The type of damage may range from localized reddening to charring and deep incision.
The yaw control loop can be configured either as a simple yaw damper (good for models with inadequate fin area) or as a combined yaw damper and side-slip controller. Because control of side-slip uses measured lateral acceleration, it will only work for those models that have enough fuselage side area to produce a measurable lateral acceleration when they side-slip (an extreme example of this is an aerobatic model flying a knife-edge maneuver where all of the lift is produced by the fuselage). Gliders with slender fuselages and flying wings cannot use this feature, but can still benefit from the yaw damper provided they have a yaw control (rudder, differential airbrakes, etc)
A fire can be started when laser beam or reflection of the beam strikes a combustible material such as rubber, plastic, human tissues, paper products, skin treated with acetone and alcohol-based preparations, human hair, and intestinal gases. Fire hazards are of particular concern in oxygen-rich atmospheres when oxygen or when nitrous oxide is being used.
With the model in FBW-A mode, put in a rapid pitch angle demand, hold it and release. Do the same in the other direction. You want the model to pitch quickly and smoothly to the new pitch angle and back again without overshoot or any porpoising. If the pitch response is too slow, then progressively increase PTCH2SRV_P in increments of 0.1 until you are happy with the response.
A wide variety of lasers are used in health care facilities. The type of laser depends on the purpose of use. Lasers can be used as knives or probes and for imaging techniques. For example, laser knives can make cuts that do not bleed. They can be used to smooth skin wrinkles or remove skin moles, cysts, tattoos, spider veins, and so forth. Some commonly used lasers are given in the following table.
With the model in FBW-A mode, put in a rapid bank angle demand, hold it and release. Do the same in the other direction. You want the model to roll quickly and smoothly to the new bank angle and back again without overshoot or any wing âwaggleâ. If the roll response is too slow, then progressively increase the RLL2SRV_P gain in increments of 0.1 until you are happy with the response or you start to get oscillation in bank angle or overshoot
Now start to increase the integrator gain RLL2SRV_I in steps of 0.05 from its default value of zero until the bank angle starts to overshoot or oscillate, then halve it.
How manytypes of laser
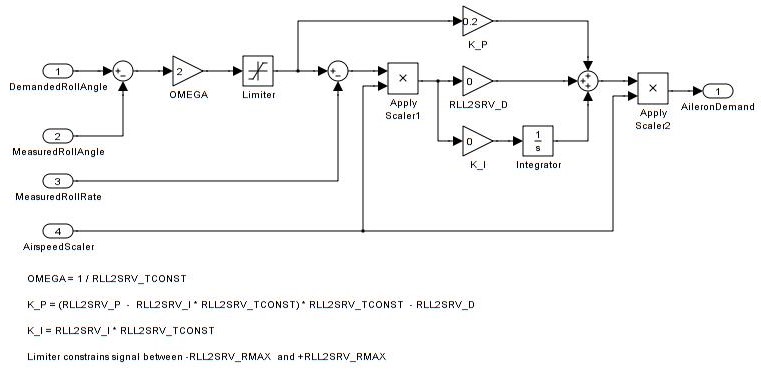
This method is the simplest and but wonât give the best result. For those users familiar with tuning the old PID controller gains, the K_P, K_I and K_D gains in this controller have the same effect, but there are some additional values that can be set by more advanced users.
Now start to increase the integrator gain PTCH2SRV_I in steps of 0.05 from its default value of zero until the pitch angle starts to overshoot or oscillate, then halve it.
The term "laser" is an acronym that stands for "Light Amplification by Stimulated Emission of Radiation". Laser light is a form of non-ionizing radiation. Laser equipment produces and amplifies light that has unique properties that cannot be produced any other way. The light that it produces is monochromatic - it is composed of one single colour at a specific wavelength. Laser radiation can be generated in different parts of the spectrum - ultraviolet (UV), visible light, and infrared (IR).
How manytypes of laser beam
The ability of eye wear to filter the laser beam is expressed in terms of optical density. Optical density, type of laser, and visibility required are all important factors in the selection of protective eye wear. Protective eye wear may not provide the same degree of protection for infrared as for visible light and ultraviolet laser beams. Goggles with side shields are preferred because they provide protection against back reflection and side entrance of stray laser beams.
Many lasers use high voltage and high current electrical power. The danger of electrical shock or electrocution arises when an untrained or unauthorized person tries to perform maintenance work without following the proper safety procedures. ANSI Standard Z136.3-2018 outlines electrical safety procedures applicable to laser equipment. Electrical safety requirements include the following:
Increase YAW2SRV_DAMP in small increments of 0.05 until the yaw angle starts to oscillate. When this happens, the tail will appear to âwagâ. Halve the gain from the value that caused the oscillation.
Check for any steady offset between nav_roll and roll. If you have followed the basic method you may see an offset which can be removed by setting RLL2SRV_I to a small value (say 0.01) which will allow the control loop to slowly trim the aileron demand to remove the steady error.
Once you are happy with the roll response you should now slowly increase the RLL2SRV_I to give the controller some âI gainâ to allow it to cope better with wind. A value of 0.05 will work for most models. If you see overshoot or oscillation when raising the I value then halve it.
Although the autopilot will prevent the integrator from increasing if the maximum elevator is exceeded, there is additional protection provided by the PTCH2SRV_IMAX parameter. This parameter sets the maximum amount of elevator(in centi-degrees) that the integrator can control. The default value of 1500 allows the integrator to trim up to 1/3 of the total elevator travel. This should be enough to allow for the trim offset and variation in trim with speed for most models.
If the model starts to wag its wings, then the default RLL2SRV_P value is too high for your model (this is unlikely but could happen) and you need to switch back to manual immediately and ask your assistant to halve the RLL2SRV_P parameter before switching back into FBW-A
Types of laserbeams pdf
Ideally you will need a second person to do this - one person to fly the plane and one person to adjust the parameters. To follow the manual parts of this procedure you need to be a proficient RC pilot or have someone who is available to help you. Otherwise you will need to start at step 2 on the Initial Assessment and be more cautious with control gain adjustment, increasing them in small steps.
With the model level apply left and right roll stick inputs on your transmitter - the controls should deflect in the same direction that they would in manual mode.
Take-off in manual and adjust the trims and throttle to a cruise position so that the plane flies straight and level at a speed that you are comfortable with. This will normally be somewhere between 30 and 60% throttle depending on how overpowered your model is.
If you see that the y acceleration is offset or spikes up during turns, then progressively increase the YAW2SRV_SLIP gain in steps of 0.5 until the error goes away or the yaw angle starts to oscillate. If yaw oscillation occurs, then halve the gain from the value at which caused the oscillation.
In workplaces where a class 3B or Class 4 laser is used, a laser safety officer (LSO) must be on staff. The laser safety officer must do the following to ensure safe use of lasers.
If you get bank angle oscillation or overshoot, then you need to reduce RLL2SRV_P. If at this point you still donât have sufficient response then you need to follow Method 2.
Roll the model rapidly from full bank in each direction and observe the lateral acceleration ay. If the lateral acceleration sits around zero and doesnât change when you roll into or out of turns then no side-slip control is necessary. You can finish at this point.
If you get pitch angle oscillation or overshoot, then you need to reduce PTCH2SRV_P. If at this point you still donât have sufficient response then you need to check your radio calibration, the minimum and maximum pitch angles and potentially follow Method 2.
Every piece of laser equipment has built-in engineering controls such as protective housing, fail-safe interlocks, master switches, beam stops and attenuators (e.g., light absorbers) to prevent accidental exposure. However, eye protection is needed while using Class 3B or Class 4 type lasers to prevent harmful exposure from reflected and scattered laser beams.
Select the tuning box on the bottom of the Mission Planners Flight Data page. You should get a scrolling black window above the map. Double click in the black window and you should get a list of parameters to plot. Change the selection until you have the pitch and nav_pitch plotted. Nav_pitch is the demand and pitch is the response. You can use this to look for overshoot and other behaviour that isnât so obvious from the ground looking at the model.
Check for any steady offset between nav_pitch-roll and pitch. If you have followed the basic method you may see an offset which can be removed by setting PTCH2SRV_I to a small value (say 0.05) which will allow the control loop to slowly trim the elevator demand to remove the steady error. The value of PTCH2SRV_I can be increased in small increments of 0.05 until you are satisfied with the speed at which the control loop âre-trimsâ.
Types of laserppt
Another property of lasers is they are coherent light sources. This feature means that lasers produce monochromatic light (i.e., with a single or selected wavelength) in which the light “particles” or photons all travel in the same direction. This directionality allows laser beams to be very focused (collimated) so they do not fan out like the light beam of a flashlight. Since the light beam can be contained in a very narrow beam, it has a high radiant power per unit area. These properties enable laser devices to produce powerful laser beams that can cut metal. In health care, lasers are used for cutting, sealing and surgical procedures.
This method can give a better result, but requires more caution because step 2) can produce a high frequency instability that unless reversion back to manual is done quickly, could overstress the plane.
Consult appropriate standards such as CSA Standard Z94.3.1-16: Guideline for selection, use, and care of eye and face protectors or American National Standards Institute / International Safety Equipment Association (ANSI/ISEA) Standard Z87.1-2020 for guidance on selecting protective eye wear for your specific application.
With the plane flying away from you switch to FBW-A. It should continue to fly wings level and at a fairly constant height (it may climb or descend slowly). If it wants to roll or pitch more than a small amount then there is a problem with the modelâs trim, autopilot level or radio calibration and you need to solve that first before proceeding further.
Now roll the model into and out of turns in both directions. If the model has a tendency to yaw the nose to the outside of the turn, then increase the YAW2SRV_RLL gain term in increments of 0.05 from its default value of 1.0. Conversely if the model has a tendency to yaw the nose to the inside of the turn on turn entry, then reduce the YAW2SRV_RLL gain term in increments of 0.01 from its default value of 1.0. If you have to go outside the range from 0.7 to 1.4, then there is something else that needs to be sorted and you should check that you have performed step 2) correctly and check your airspeed calibration if airspeed is being used.
For example, the CSA Standard Z386-20 "Safe Use of Lasers in Health Care" specifies that facilities using lasers shall have a laser safety officer (LSO) and a laser safety committee (LSC) to perform risk assessments, and to ensure that laser safety policies and procedures are developed, implemented and maintained.
Level the model - the control surfaces should be close to neutral. There will be a little bit of displacement, but any more than 10% of your maximum throw indicates that the autopilot has not been leveled or the radio calibration needs to be repeated.
Although the autopilot will prevent the integrator from increasing if the maximum aileron is exceeded, there is additional protection provided by the RLL2SRV_IMAX parameter. This parameter sets the maximum amount of aileron (in centi-degrees) that the integrator can control. The default value of 1500 allows the integrator to trim up to 1/3 of the total aileron travel. This parameter should not need to be changed unless you are trying to tune the controller to be able to compensate for large roll offsets due to system failures.
With the model level apply up and down pitch stick inputs on your transmitter the controls should deflect in the same direction that they would in manual mode.
This method will give a better result, but requires more caution because step 2 can produce a high frequency instability that can overheat the aileron servo(s) if allowed to continue.
Types of laserPDF
Increase RLL2SRV_D in increments of 0.01 until it it starts to oscillate, then halve it. Do not go above 0.1 for RLL2SRV_D without checking the temperature of your servos when you land as in extreme cases turning up this gain can cause rapid servo movement and overheat the servos leading to premature failure.
The time constant parameter PTCH2SRV_TCONST can also be used to adjust how rapidly the pitch angle reaches the demanded value. The effect of this parameter will be seen mostly in the response to small step changes in demanded pitch. For larger pitch demands, the pitch rate limits PTCH2SRV_RMAX_DN and PTCH2SRV_RMAX_UP tend to mask its effect. Making this parameter smaller will cause the aircraft to reach its demanded pitch angle in less time, but only if the aircraft is capable. A very slow responding airframe may require a slightly larger setting for this parameter.
The time constant parameter RLL2SRV_TCONST can also be used to adjust how rapidly the bank angle reaches the demanded value. The effect of this parameter will be seen mostly in the response to small step changes in demanded roll. For larger roll demands, the roll rate limit RLL2SRV_RMAX tends to mask its effect. Making this parameter smaller will cause the aircraft to reach its demanded roll angle in less time, but only if the aircraft is capable. A very slow responding airframe may require a slightly larger setting for this parameter.
Increase PTCH2SRV_D in increments of 0.01 until it it starts to oscillate, then halve it. Do not go above 0.1 for PTCH2SRV_D without checking the temperature of your servos when you land as in extreme cases turning up this gain can cause rapid servo movement and overheat the servos leading to premature failure.
These instructions will teach you how to tune the roll, pitch and yaw response of your aircraft. This is the first tuning you should do with a new aircraft, as everything else relies on getting this right.
There are two types of laser hazards: the laser beam hazards and the non-beam hazards. Laser beam hazards include eye and skin burns which are due to laser beam shining on a person's body. Non-beam hazards are associated with the laser equipment or the hazardous substances released from the laser equipment, and fumes emitted from materials exposed to laser beams, including laser-plumes produced during surgical procedures.
Verify that the YAW2SRV_SLIP and YAW2SRV_INT gain terms are set to zero, the YAW2SRV_RLL gain term is set to 1.0 and the YAW2SRV_DAMP gain term is set to zero
The maximum roll rate can be constrained to make the model bank more smoothly by setting the roll rate limit RLL2SRV_RMAX parameter to a non-zero value. The default value of 60 deg/sec works well for most models. Setting this parameter to 0 turns the rate limiter off and can make the effect of tuning changes easier to see. If this value is reduced too far, then the roll controller is unable to keep up with demands from the navigation controller which leads to overshoot and weaving in the aircraftâs trajectory.
If the model starts to porpoise, the default PTCH2SRV_P value is too high (this is unlikely but could happen) and you need to switch back to manual immediately and ask your assistant to halve the PTCH2SRV_P parameter before switching back into FBW-A
The CSA Standard Z305.13-13 (R2020) "Plume scavenging in surgical, diagnostic, therapeutic, and aesthetic settings" also requires that:
The ANSI Standard Z136.1 recommends a laser safety program for workplaces using class 3B or class 4 lasers. Following are the essential components of a laser safety program:
The eye is the most vulnerable to injury from a laser beam. The potential for injury depends on the power and wavelength of the laser beam (light). Intense bright visible light makes us blink as a reflex reaction. This closing of the eye provides some degree of protection. However, visible laser light can be so intense that it can do damage faster than a blink of an eye. The invisible infrared laser beam, such as carbon dioxide (CO2) laser beam, does not produce a bright light that would cause the blinking reflex or the pupil to constrict and, therefore, chances of injury are greater compared to visible light beam of equal intensity.
If you have an airspeed sensor enabled then blow air towards the front of the pitot tube and watch the HUD. You should see the airspeed reading increase
Plot the roll_speed in the tuning window. This shows the rate of roll in radians/second. A value of 1 radian/second is approximately equal to 60 degrees/second (57 to be more precise), so if you have RLL2SRV_RMAX set to 60, the maximum roll_speed when responding to a large bank angle demand (eg full bank one way to full bank the other) should be just above 1.0. A value of greater than 1.1 indicates that RLL2SRV_P is too high and should be reduced, whereas a value of less than 1 indicates that RLL2SRV_P should be increased.
Now roll the model to maximum bank in each direction. The nose should stay fairly level during the turns without significant gain or loss of altitude. Some loss of altitude during sustained turns at constant throttle is expected, because the extra drag of turning slows the model down which will cause a mild descent. If the model gains height during the turns then you need to reduce the PTCH2SRV_RLL by small increments of 0.05 from the default value of 1.0. If the model descends immediately when the model banks (a mild descent later in the turn when the model slows down is normal as explained earlier) then increase the PTCH2SRV_RLL by small increments of 0.01 from the default value of 1.0. If you need to change the PTCH2SRV_RLL parameter outside the range from 0.7 to 1.4 then something is likely wrong with either the earlier tuning of your pitch loop, your airspeed calibration or your autopilotâs bank angle estimate.
With the model in FBW-A mode, put in a rapid bank angle demand by pushing the aileron stick all the way over, hold it for a couple of seconds and then release. Do the same in the other direction. You want the model to roll quickly and smoothly to the new bank angle and back again without overshoot or any wing ârockingâ. If the roll response is too slow, then progressively increase RLL2SRV_P in increments of 0.1 until you are happy with the response.
We strongly recommend that you use AUTOTUNE to perform roll/pitch/yaw tuning. The instructions in this article should be used if you are unable to fly.
Types of laserin Physics
Set the YAW2SRV_INT gain term to 1.0. If this causes the yaw angle to oscillate then halve the gain from the smallest value that causes oscillation.
Alignment eye wear: This type of eye wear is used for low power visible laser beams. Alignment eye wear should not be worn during the operation of high power or invisible laser beams. Instead, safety eye wear that provides adequate protection should be worn.
Now rapidly roll the model from maximum bank angle in one direction to maximum bank angle in the opposite direction. Do this several times going in each direction and observe the yawing motion of the model. If as the wings pass through level the nose is yawed in the opposite direction to the roll (for example when rolling from left to right bank, the nose points left) then increase the value of KFF_RDDRMIX gain until the yaw goes away. Do not use a value larger than 1.
Plot the pitch_speed in the tuning window. This shows the rate of pitch in radians/second. A value of 1 radian/second is approximately equal to 60 degrees/second (57 to be more precise), so if for example you had PTCH2SRV_RMAX_DN/UP set to 30, the maximum pitch_speed when responding to a large pitch angle demand (eg full pitch one way to full pitch the other way) should be just above 0.5. A value of greater than 0.6 would indicate that PTCH2SRV_P is too high and should be reduced, whereas a value of less than 0.5 would indicate that RLL2SRV_P should be increased.
The rate of pitch (and therefore the reduce the number of gâs) used to correct pitch angle errors can be limited setting the pitch rate limit PTCH2SRV_RMAX_DN and PTCH2SRV_RMAX_UP parameters to non-zero values. Setting these values to 560 divided by the airspeed (in metres/second) gives a limit equivalent to approximately +- 1g.
The location of the damage depends on the optical nature of the laser beam. Lasers in the visible light and near infrared range focus on retina. Therefore the injuries produced are retinal burns. The infrared radiation is absorbed in the cornea and may cause corneal damage and loss of vision.
The color of laser light is usually described in terms of the wavelength of the laser radiation. The most common unit used for the wavelength of laser is a nanometer (nm - one billionth of a metre). Light from other sources is made up of combination of colours at various wavelengths.



 Ms.Cici
Ms.Cici 
 8618319014500
8618319014500