
Principles of multiphoton microscopy - multiphoton microscopy
Autocollimatortelescope
Accessories for the ACT-25 include Hollow Retroreflectors, Lateral Transfer Hollow Retroreflectors (LTHRTM), Lateral Transfer Hollow Periscopes (LTHPTM), Tool Cube TM and cooperative target .
AutocollimatorPDF
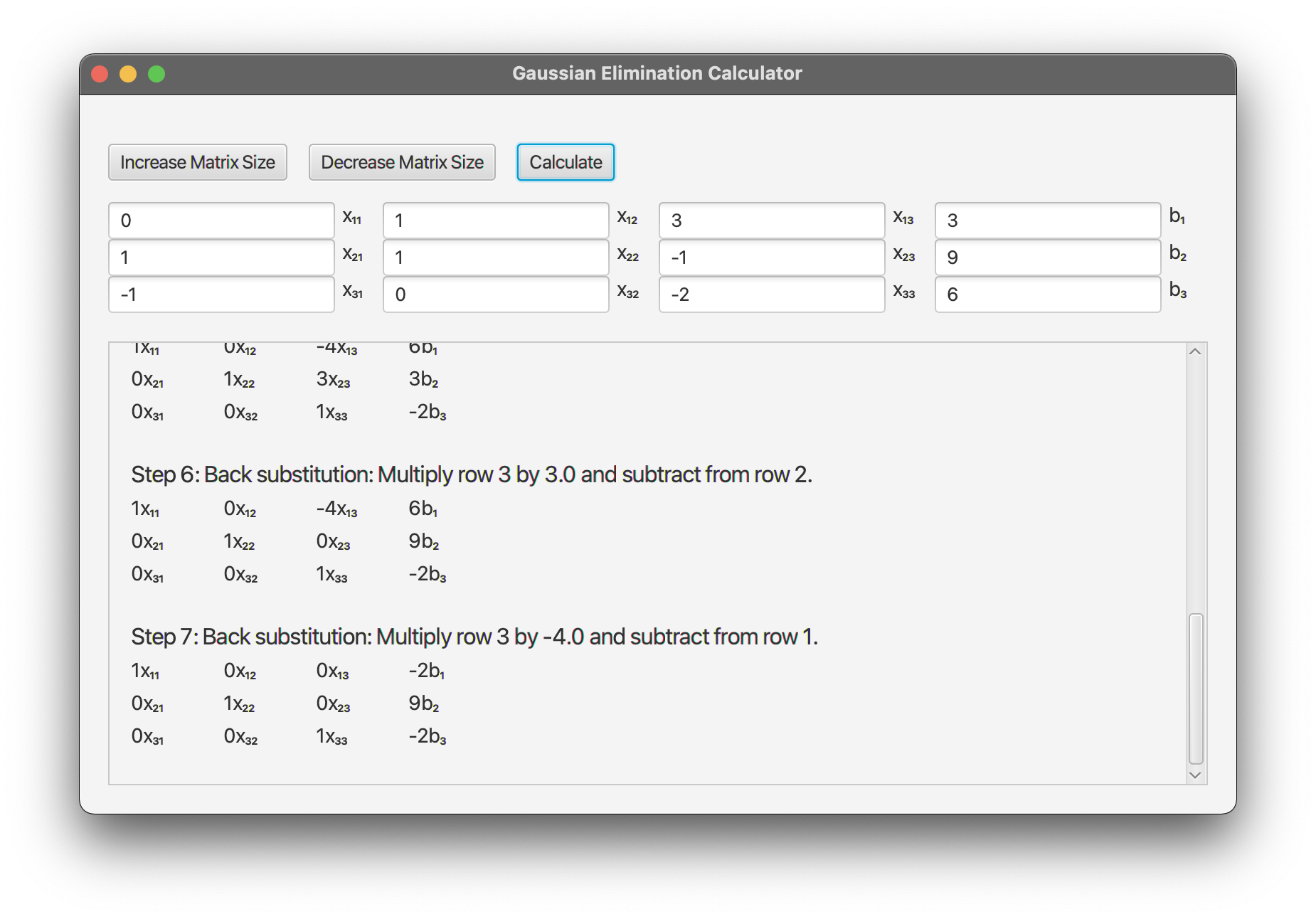
Gaussian elimination calculator for solving systems of linear equations with multiple unknown variables, written in java
The core of the algorithm is located in the GaussianElimination.java file, with the matrix data being held in an instance of the GaussMatrix.java class.
Autocollimatorformula

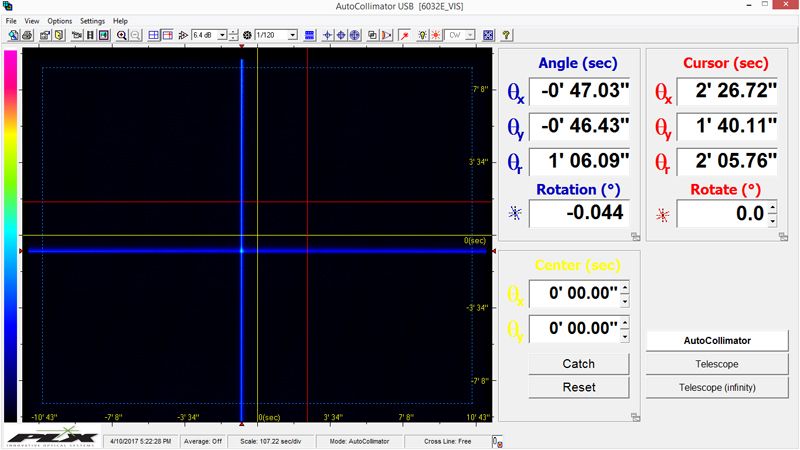
Exposure via gain and shutter speed can be set automatically or adjusted manually if necessary. In conjunction with a special tracking target, the software will automatically find the center of the target as the target is moved through the field of view. This is useful for measuring straightness of travel of translation stages and machine beds.
Autocollimatorworking principle
The second mode is as an alignment telescope. Here there are two options, they are labeled Telescope and Telescope (infinity). A Telescope option is used with a Cooperative Target. The software recognizes the target geometry and tracks the center of the target. In this mode it is necessary to know the distance between the target and the alignment telescope. With this application the display gives the linear displacement of the target.
A calculator for the gaussian elimination algorithm to solve systems of linear equations with multiple unknown variables, written in Java.
Data logging is supported and can be configured to record for a predetermined time or a fixed number of data points. The recording interval can also be set. The data can be saved to a file or streamed to a remote location via RS-232 or TCP/IP. The communication setting for both RS-232 and TCP/IP is fully configurable from the software.
Boresighting is the aligning of a targeting system or systems with the barrel of a weapon, or the co-alignment of different targeting systems (visible and infrared). Boresighting will typically require some additional set-up/equipment. This could take the form of an accurate translation stage or an LTHR or periscope possibly equipped with a beam splitter.
The Electronic Autocollimator/Alignment Telescope is a precision optical device, and it has two distinct modes of operation. The basic difference between the two modes is that the autocollimator measures tilt or rotation of the object while the alignment telescope measures lateral displacement. Also, lateral displacement can be given as either a linear value or an angular displacement, depending on the set-up. Certain applications may require that both modes are employed.
Autocollimatorfor sale
As an autocollimator, the unit projects a crosshair pattern out to the object being monitored. The object needs to be either highly reflective or have a mirror attached to it. The cross hair is reflected back to the autocollimator and the degree of tilt of the object is measured. You do not see the actual object, just the reflection of the cross hairs.
Designed by Tackle Box Marketing Communications, developed and maintained by Soundlining 2024 © PLX Inc. All rights reserved. All material herein is the property of PLX Inc. and shall not be reproduced without the written permission of PLX Inc.
Besides taking interval measurements, the software supports video recording of the screen image for later playback and analysis.
AutocollimatorThorlabs
Autocollimatorprice
LTHRs and Periscopes are used to offset the beam of the autocollimator, while maintaining parallelism to the original beam direction, allowing you to create a second optical axis. You'll find this useful in boresighting and other multi-axis alignment situations. The Periscope offsets the beam while keeping it going in the same direction while the LTHR offsets the beam and changes the direction 180°. Both the Periscope and LTHR can be equipped with a beamsplitter to provide two parallel beams at the same time.
The state-of-the-art retroreflector is useful for setting the infinity focus of the autocollimator and verifying its performance.
To account for different measuring conditions the software can average measurements or merge them. Average will reduce the fluctuations in the reading in cases where there is a slight jitter or vibration in the object being measured. Merge integrates several (2 to 10) measurements to account for low light levels.
This project is intended for education purposes. For understanding the maths behind it, the calculator has a built-in calculation path step trace, and an easy-to-use GUI. Note that the calculator will only change a given matrix to the reduced row echelon form, from which the solution vector can be read.
Gaussian elimination calculator for solving systems of linear equations with multiple unknown variables, written in java



 Ms.Cici
Ms.Cici 
 8618319014500
8618319014500