
pinion, n.¹ meanings, etymology and more - pinion in english
Kinematic mountwiki
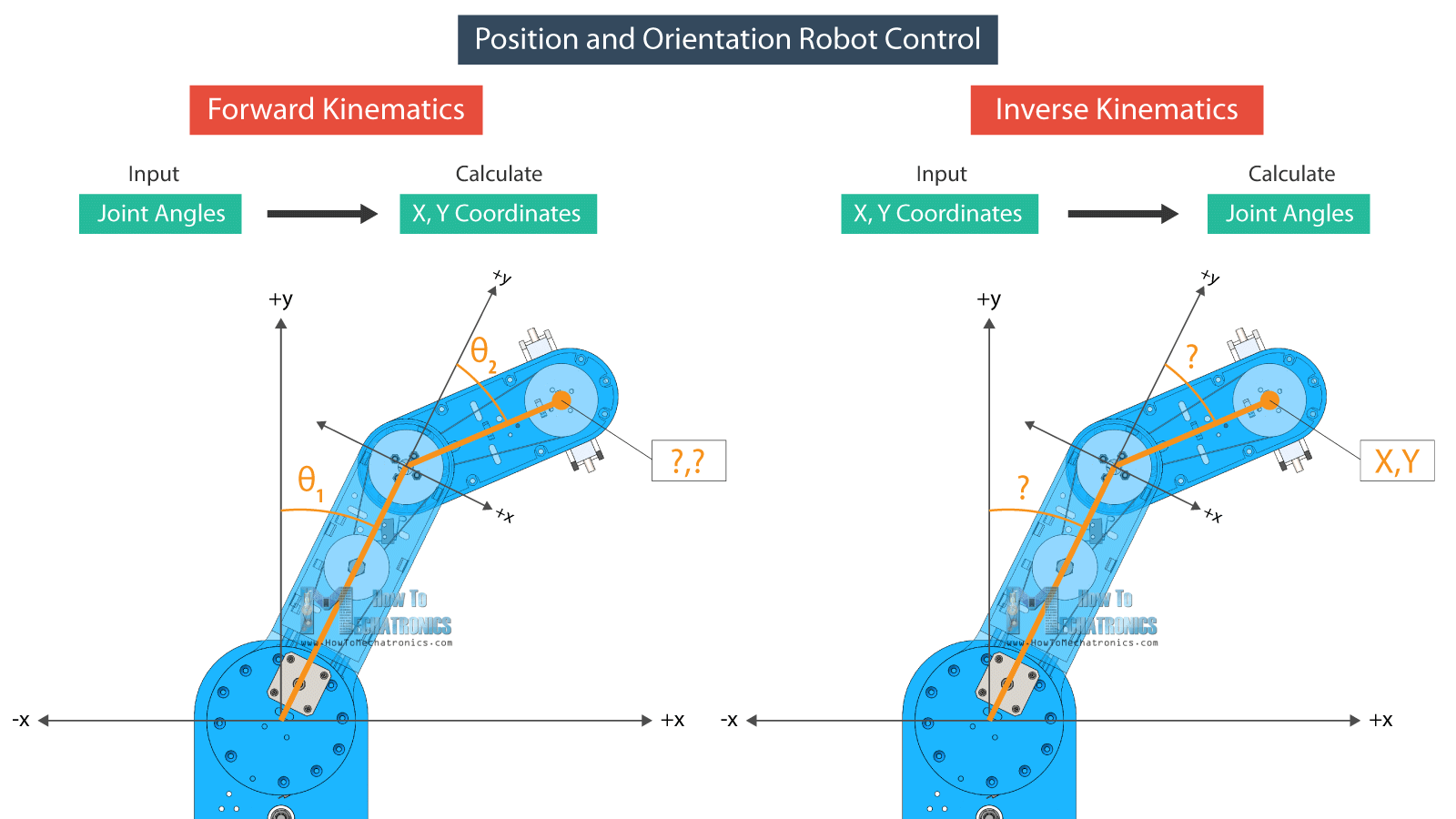
A 6 DOF robot arm can hold any âposeâ (3 positions, 3 rotations) with only one joint solution (actual orientation of the arm), but some newer arms include 7 DOF, such that they can hold any pose while retaining a ânull spaceâ where the robotâs joints can rotate through a range of possible orientations that still maintain the end effector pose. This allows the robot arm to be moved out of the way of obstacles in itâs working environment while maintaining position of the end effector:
Picking an appropriate machine layout is probably one of the first things we do when thinking of a new machine: this is basically âin what order do the axes bolt on to one anotherâ and there are a few prototypical forms we can see to get oriented:
These are the modern cousin to knee mills. Notice the large cantilever on the Z Axis: these are typically large machines w/r/t their build volumes.
I think I only have time for one of these examples, but itâs the most common: if we consider a gantry machine with two Y Axes, like clank:
My own toolchanger is also a kinematic mount, although itâs a bit unconventional (made for ease of manufacture & actuation) you can track that project here.
Kinematic mountrepeatability
Copyright © 2021 MIT Center for Bits and Atoms. This work may be reproduced, modified, distributed, performed, and displayed for any purpose, but must acknowledge the Machines that Make project. Copyright is retained and must be preserved. The work is provided as is; no warranty is provided, and users accept all liability.
Thereâs a few ways to skin the 5ax cat, and debate as to which is best. For a five axis machine, we essentially have all of the DOF we might need to machine any geometry (as the 6th axis, rotation along the axis of the spindle, is redundant), but varying layouts offer varying stiffnesses & âreachabilityâ - how easy it is to manouver the tool onto i.e. the underside of a work piece. Part fixturing here also becomes important!
There are infinitely many variations on machine kinematics, like I said earlier these lists are not extensive. We can do better with our time to try to understand some of nuance that might appear as we design these things.
Kinematic mountdesign
Kinematics is not just about couplings. One way to think of this: each of our Transform Matrices have one âlooseâ or unconstrained DOF: the degree of freedom that is actuated at that junction. Kinematics is about precisely constraining all other degrees of freedom in the matrix without âbinding upâ the free DOF.
Kinematic mountcomponents
Kinematiccoupling
But when the motors are on, this is perfectly constrained. If the Y-Left assembly and Y-Right assembly were identical, Clank would be over-constrained. Itâs worth noting that if we were to write a suitable controller for Clank, we could control this slight rotation in the XY plane of the Y axis: the machine has âthree axisâ but four motors: using differential drive on the Y-Left and Y-Right motors would allow use of the âlooseâ DOF here. In practice, the motors simply mirror one another.
If we need to (typically only when we have rotary joints) we can formulate a machineâs kinematics in terms of homogeneous transform matrices or HTMs - here, from some âgroundâ reference space (or world coordinate system WCS) we can express each subsequent axis location as some multiplication of HTMs.
The VMC is a classic workhorse, and not insurmountable to build in the lab. See this youtube channel to see a homebrew, 700kg epoxy granite build.
KinematicBase
âScaraâ arms are two or three-DOF (adding Z) machines typically made for rapid motion: the rotary linkages are lighter to swing around than heaving large axis over the same work space. In addition, they have small footprints relative their work area.
While machine layout is blatantly obvious, the way a machineâs kinematic constraints are worked out is often more subtle. Understanding kinematic constraint can make a world of difference during machine design, but it is often overlooked.
Most importantly, this design means that the left-side Y rail and right-side Y rail do not have to be perfectly parallel - because the Y-Right assembly has no X constraint, the rail on this side can âwanderâ without causing two X-Constraints to fight with one another.
So: a bit subtle, kind of boring, and easy to ignore, but careful kinematic design is what can make your machine glide like this:
Kinematic MountThorlabs
These are typically âwide and flatâ and prioritize XY traverse speeds. They are typically about the same size as their working volumes, making them suitable for large format machining of (i.e.) 4x8â stock or longer. Stock material are typically sheet-like.
Most kinematic mounts are low stiffness because points of contact are meant to be vanishingly small (of course in practice they never are, and Hertz Stress is where to start to understand why) and so we rarely see kinematic mounts used in high-load applications like CNC Milling.
NewportKinematic Mount

There are others who do a better job at this than I can, so I would point us towards this pdf from the University of Arizona.
We typically become acquanted with this idea through kinematic couplings that precisely constrain one rigid contact between two bodies, along all 6 DOF. Slocum has done a review on these in 2010, where this image is from:
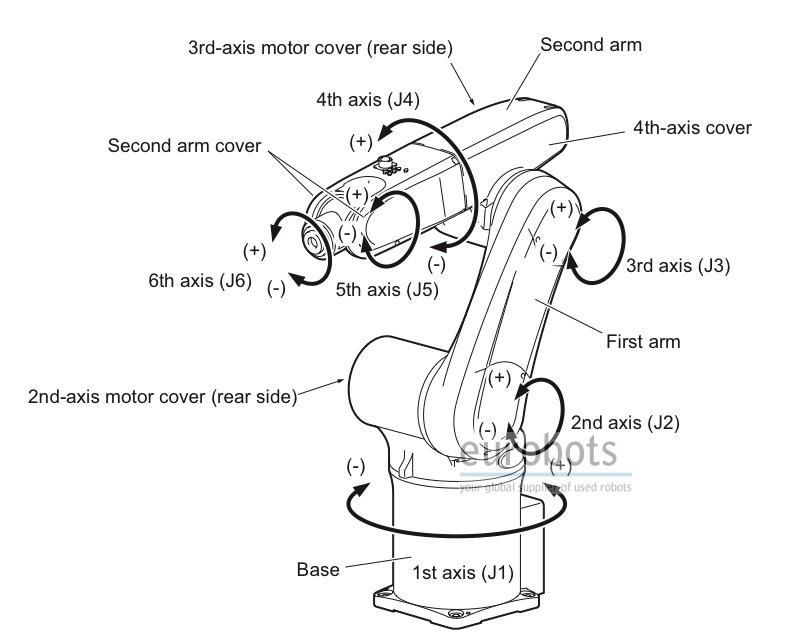
These are everywhere, and typically used for material handling / âgeneralizedâ automation. They are long forward-chains of rotary transforms, ang gearboxes / actuators capable of producing enough torque (at low enough weights) remain expensive.
We can also think about structures has having DOF, i.e. in the case of unstable (underconstrained), stable (well constrained) and indeterminate (overconstrained) frames. In a sense, structural stability and kinematic constraint are one and the same.
We can see that this is composed of elements from the earlier image. We find these in practice most often in toolchangers like Joshua Vasquez:



 Ms.Cici
Ms.Cici 
 8618319014500
8618319014500