
Density Calculator | How to Calculate Explained - density of a rectangular prism
Gaussian beamOptics CVI laser Optics idex Optics photonics
Likewise, Eloking is not endorsed by Riot Games and does not reflect the views or opinions of Riot Games or any entities officially involved in producing or managing League of Legends or Valorant. League of Legends and Valorant are trademarks or registered trademarks of Riot Games, Inc.
Two types of analysis were done - (a) finding the beam width w(z) at each of the 32 distances and (b) constructing the beam profile from these results. Both used the least-squares method that was employed previously with the green laser pointer data.
Gaussian beamcalculator
The razor blade was taped to a right-angle bracket that was attached to a micrometer-driven translation stage. We moved in steps of either 1 or 2 mils. (One mil equals 0.001 inch or 25.4 microns.) We made these measurements at 31 different distances under 70 mm and also at 300 mm. In all, we wrote down and entered over 1000 data points by hand. In retrospect we took more data than we needed. Fewer width measurements over more evenly spaced distances would have been sufficient.
Our results are shown in Figure 5. We found that the waist position was 3.6 cm behind the front face of the laser, which must therefore be where the surface of the output coupler mirror is. We also found w0 = 299.3 microns, which corresponds to a Rayleigh range [1] of 444 mm.
In this case the changing intensity of the part of the beam that's not cut off is given by an integral like this, where x is the position of the blade. The theoretical curve given by this integral can be matched to the data points by a least-squares method like we used before. The result is the width w of the laser beam at some particular distance from the laser. 2. Setup and Procedure Figure 3 shows our setup. We initially used the same green laser pointer as before but unfortunately the characteristics of its beam suddenly changed when a new battery was used, possibly due to damage to its crystal. Therefore we switched to the very stable red HeNe laser shown. The photodetector was a Thorlabs DET110 whose current was read by a multimeter. We placed a converging lens ahead of the detector to ensure that none of the beam missed the detector. As shown the detector was intentionally placed away from the exact focus of the lens to avoid possibly damaging the detector. Figure 3a. A bird's eye view of the experimental setup Figure 3b. A picture of the setup The razor blade was taped to a right-angle bracket that was attached to a micrometer-driven translation stage. We moved in steps of either 1 or 2 mils. (One mil equals 0.001 inch or 25.4 microns.) We made these measurements at 31 different distances under 70 mm and also at 300 mm. In all, we wrote down and entered over 1000 data points by hand. In retrospect we took more data than we needed. Fewer width measurements over more evenly spaced distances would have been sufficient. 3. Analysis and Results Two types of analysis were done - (a) finding the beam width w(z) at each of the 32 distances and (b) constructing the beam profile from these results. Both used the least-squares method that was employed previously with the green laser pointer data. When finding the beam width by the least squares method one has the problem that the theoretical function (integral of a Gaussian) can not be written as a formula and thus cannot be directly compared to the data. The integral in fact defines a special function called the "error function," or erf(x). We dealt with this by numerically integrating the trial Gaussian functions and comparing these numerical integral curves to the data. The numerical integral is computed by simply summing all the Gaussian values up to some particular point x. The result of one such least squares analysis is shown in Figure 4. Figure 4. One of 32 sets of width data with its best-fit erf curve. When we plotted the 32 different beam width values, w(z), we found that the points formed a hyperbola. According to the reference below and others, the formula for the hyperbola is where w0 is the beam width at its minimum value, or "beam waist," zwaist is the distance of the beam waist from the face of the laser, and λ is the wavelength of the laser. A positive zwaist means the waist is in front of the laser's front face. Our results are shown in Figure 5. We found that the waist position was 3.6 cm behind the front face of the laser, which must therefore be where the surface of the output coupler mirror is. We also found w0 = 299.3 microns, which corresponds to a Rayleigh range [1] of 444 mm. Figure 5. Measured and best-fit beam profile. We can determine the length of the laser cavity by finding the beat frequency between the longitudinal modes of the laser. The equation of beat frequency is where c is the speed of light. With help from Vince [link] we found a beat frequency of 685.81 MHz, which corresponds to L = 21.8 cm. This result is in reasonable agreement with our conclusion that the waist is 3.6 cm behind the face of the laser, since the total length of the laser is 27.0 cm. By finding the divergence of the laser beam, which explains how the beam diffracts at large distances as the hyperbolic curve approaches a line, we were able to calculate the wavelength of the laser beam. The beam's divergence, theta, is described by the equation: [4] Equation[4] can be used to find the wavelength of the laser beam by using the approximate slope of the curve as the divergence. Using a divergence of 6.568 radians, and a waist size of 299.3 micrometers, we found that the wavelength of the laser was 617.58 nanometers. The error in this calculation is only 2.28 percent, when compared to the theoretical value of the laser, which was 632 nanometers. Conclusion In this project we learned not only about the changing profile and propagation of a laser beam, we also discovered how to determine the length and mirror configuration of the laser cavity. Finally, we learned that careful measurements of the beam profile such as ours can even be used to roughly determine the wavelength of the laser! References [1] Enrique J. Galvez. "Gaussian beams in the optics course." Am. J. Phys. 74, xxx-xxx (2006).
We can determine the length of the laser cavity by finding the beat frequency between the longitudinal modes of the laser. The equation of beat frequency is where c is the speed of light. With help from Vince [link] we found a beat frequency of 685.81 MHz, which corresponds to L = 21.8 cm. This result is in reasonable agreement with our conclusion that the waist is 3.6 cm behind the face of the laser, since the total length of the laser is 27.0 cm. By finding the divergence of the laser beam, which explains how the beam diffracts at large distances as the hyperbolic curve approaches a line, we were able to calculate the wavelength of the laser beam. The beam's divergence, theta, is described by the equation: [4] Equation[4] can be used to find the wavelength of the laser beam by using the approximate slope of the curve as the divergence. Using a divergence of 6.568 radians, and a waist size of 299.3 micrometers, we found that the wavelength of the laser was 617.58 nanometers. The error in this calculation is only 2.28 percent, when compared to the theoretical value of the laser, which was 632 nanometers. Conclusion In this project we learned not only about the changing profile and propagation of a laser beam, we also discovered how to determine the length and mirror configuration of the laser cavity. Finally, we learned that careful measurements of the beam profile such as ours can even be used to roughly determine the wavelength of the laser! References [1] Enrique J. Galvez. "Gaussian beams in the optics course." Am. J. Phys. 74, xxx-xxx (2006).
高斯光束
This mini-project consisted of two parts. First, we looked at how the laser beam from a green laser pointer diverges with increasing distance. This part of the experiment was done in the long hallway outside the lab, where we could place the laser as much as several hundred feet away from the screen. Later we measured the intensity profile of a red HeNe laser by a much more precise method at distances that were mostly less than one meter from the laser. Our results showed that the profile is not linear as we originally expected, but rather is curved. The actual hyperbolic shape is approximately constant near the laser and diverges in proportion to distance in the far field, due to diffraction.
We plotted and analyzed our data in a spreadsheet program. We used the Least Squares Method to determine the slope of the line of form ax + b that best matches the data. This method works by squaring the difference between each corresponding theoretical and experimental value. All of these terms are added together to produce a measure of the total error. By minimizing the total error by changing the parameters, we could find the curve that best represents the data points.
Besselbeam
Since FOVs impact how much a player can see in the field, it’s a good idea to make sure that it’s set in a way that can give enough information without being overbearing. The FOV setting that most pro players in Rocket League use is around 110.
Remember, what works for others may not work for you, so always try to play around and adjust it to whatever makes you feel most comfortable.
Mathematics of vectorialgaussianbeams
FOV is an abbreviation that stands for field of view or field of vision. Field of view is essentially how much a player’s camera captures, and it depends on multiple factors, like how wide it is. Often, FOVs are measured in angles, where a higher angle means a higher FOV.
Our green laser was held on a small tripod stand that sat on the ground, and was pointed at the wall at the end of the hallway. Each of us separately visually estimated the diameter of the laser spot on the wall using a meter stick. We repeated this procedure at several distances from the wall, from 35 meters (116 feet) up to about 141 meters (480 feet). We used a 25 foot tape measure to make marks every 25 feet in the hallway to make measuring the distances more convenient.
Counter-Strike: Global Offensive, Counter-Strike 2 and Dota 2 are registered trademarks of Valve Corporation. Eloking is neither affiliated with nor endorsed by Valve Corporation. Content on Eloking does not reflect the views or opinions of Valve Corporation or any parties officially involved in producing or managing Valve Corporation games.
Now that you have learned something new - it's time you start playing and get better. We can help! Buy ELO Boost and start playing at the rank you deserve!
Besides just the angle, FOV is determined by multiple other factors. Some of these factors include how high the camera is, how far behind it is, and even the peripherals! Those who have displays with a square aspect ratio will find that their FOV is lesser, at least horizontally. On the other hand, those with ultrawide monitors or a multi-monitor setup will be able to see a lot more in the game.
laguerre-gaussianbeam
Besides just the FOV gauge, other settings can assist in looking at the pitch properly. Settings such as distance, height, and angle make a huge difference, so having them at the perfect values is essential if a player wants to go pro. Most professional Rocket League players set their distance from 260-280, height from 90-110, and the angle around -4.
Laguerre-Gaussian mode
Figure 3 shows our setup. We initially used the same green laser pointer as before but unfortunately the characteristics of its beam suddenly changed when a new battery was used, possibly due to damage to its crystal. Therefore we switched to the very stable red HeNe laser shown. The photodetector was a Thorlabs DET110 whose current was read by a multimeter. We placed a converging lens ahead of the detector to ensure that none of the beam missed the detector. As shown the detector was intentionally placed away from the exact focus of the lens to avoid possibly damaging the detector.
Rocket League is a registered trademark of Psyonix LLC. Eloking is not affiliated with nor endorsed by Psyonix LLC. Content on Eloking does not reflect the views or opinions of Psyonix LLC or any parties officially involved in producing or managing Rocket League.
This website uses cookies to improve user experience. By using our website you consent to all cookies in accordance with our Cookie Policy.
Artwork and content produced by Eloking are independently created and should be considered fan art, not officially affiliated with the trademark owners mentioned. No endorsement from the trademark owners is expressed or implied.
In this project we learned not only about the changing profile and propagation of a laser beam, we also discovered how to determine the length and mirror configuration of the laser cavity. Finally, we learned that careful measurements of the beam profile such as ours can even be used to roughly determine the wavelength of the laser!
The graph above shows our results. It is apparent from the graph that a line passing through the origin (b=0) is sufficient to represent the data. We realized from this initial experiment that we need to measure (profile) the beam diameter much closer to the laser. The beam is very small there so a more exact method is needed.
COMSOLGaussian beam
Overwatch and Overwatch 2 are registered trademarks of Blizzard Entertainment. Eloking is not affiliated with nor endorsed by Blizzard Entertainment.
In this equation r is the distance from the center of the beam and A(z) and w(z) describes the peak intensity and width of the beam, which both change with distance z along the beam. I(r) can be measured directly by moving a pinhole across the beam and recording how much light passes through it, as this past LTC student did. Unfortunately one needs a very tiny pinhole or narrow slit to get accurate results where the beam is very small. A better method is to gradually cut off the beam by moving a razor blade into it, as shown in this figure.
Many people have the idea that laser beams are perfectly parallel "lines of light." Initially, we also held this naive belief, but Dr. Noe challenged our misunderstanding by demonstrating that the beam from a green laser pointer clearly diverges. But how does the size of the laser beam relate to the distance to the screen? We hypothesized that the beam width could not be directly proportional to the distance because if that were true, extrapolating back to a distance of zero from the laser would produce a beam size of zero, which just didn’t make sense. We believed that the relationship would be linear, but rather than being directly proportional the diameter and distance would be related by an equation of the form ax + b, where a is the rate of divergence and b is the initial diameter at zero distance.
where c is the speed of light. With help from Vince [link] we found a beat frequency of 685.81 MHz, which corresponds to L = 21.8 cm. This result is in reasonable agreement with our conclusion that the waist is 3.6 cm behind the face of the laser, since the total length of the laser is 27.0 cm. By finding the divergence of the laser beam, which explains how the beam diffracts at large distances as the hyperbolic curve approaches a line, we were able to calculate the wavelength of the laser beam. The beam's divergence, theta, is described by the equation: [4] Equation[4] can be used to find the wavelength of the laser beam by using the approximate slope of the curve as the divergence. Using a divergence of 6.568 radians, and a waist size of 299.3 micrometers, we found that the wavelength of the laser was 617.58 nanometers. The error in this calculation is only 2.28 percent, when compared to the theoretical value of the laser, which was 632 nanometers. Conclusion In this project we learned not only about the changing profile and propagation of a laser beam, we also discovered how to determine the length and mirror configuration of the laser cavity. Finally, we learned that careful measurements of the beam profile such as ours can even be used to roughly determine the wavelength of the laser! References [1] Enrique J. Galvez. "Gaussian beams in the optics course." Am. J. Phys. 74, xxx-xxx (2006).
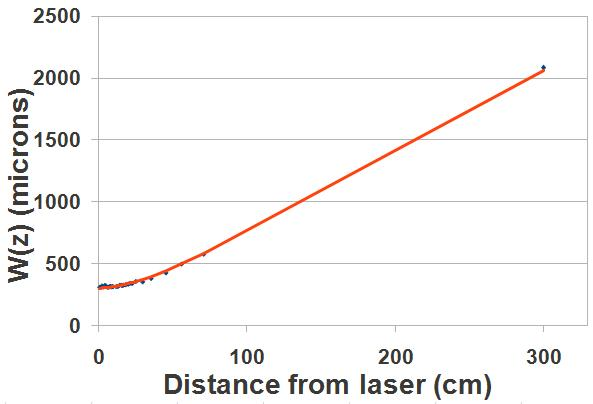
When we plotted the 32 different beam width values, w(z), we found that the points formed a hyperbola. According to the reference below and others, the formula for the hyperbola is where w0 is the beam width at its minimum value, or "beam waist," zwaist is the distance of the beam waist from the face of the laser, and λ is the wavelength of the laser. A positive zwaist means the waist is in front of the laser's front face. Our results are shown in Figure 5. We found that the waist position was 3.6 cm behind the front face of the laser, which must therefore be where the surface of the output coupler mirror is. We also found w0 = 299.3 microns, which corresponds to a Rayleigh range [1] of 444 mm. Figure 5. Measured and best-fit beam profile. We can determine the length of the laser cavity by finding the beat frequency between the longitudinal modes of the laser. The equation of beat frequency is where c is the speed of light. With help from Vince [link] we found a beat frequency of 685.81 MHz, which corresponds to L = 21.8 cm. This result is in reasonable agreement with our conclusion that the waist is 3.6 cm behind the face of the laser, since the total length of the laser is 27.0 cm. By finding the divergence of the laser beam, which explains how the beam diffracts at large distances as the hyperbolic curve approaches a line, we were able to calculate the wavelength of the laser beam. The beam's divergence, theta, is described by the equation: [4] Equation[4] can be used to find the wavelength of the laser beam by using the approximate slope of the curve as the divergence. Using a divergence of 6.568 radians, and a waist size of 299.3 micrometers, we found that the wavelength of the laser was 617.58 nanometers. The error in this calculation is only 2.28 percent, when compared to the theoretical value of the laser, which was 632 nanometers. Conclusion In this project we learned not only about the changing profile and propagation of a laser beam, we also discovered how to determine the length and mirror configuration of the laser cavity. Finally, we learned that careful measurements of the beam profile such as ours can even be used to roughly determine the wavelength of the laser! References [1] Enrique J. Galvez. "Gaussian beams in the optics course." Am. J. Phys. 74, xxx-xxx (2006).
where w0 is the beam width at its minimum value, or "beam waist," zwaist is the distance of the beam waist from the face of the laser, and λ is the wavelength of the laser. A positive zwaist means the waist is in front of the laser's front face. Our results are shown in Figure 5. We found that the waist position was 3.6 cm behind the front face of the laser, which must therefore be where the surface of the output coupler mirror is. We also found w0 = 299.3 microns, which corresponds to a Rayleigh range [1] of 444 mm. Figure 5. Measured and best-fit beam profile. We can determine the length of the laser cavity by finding the beat frequency between the longitudinal modes of the laser. The equation of beat frequency is where c is the speed of light. With help from Vince [link] we found a beat frequency of 685.81 MHz, which corresponds to L = 21.8 cm. This result is in reasonable agreement with our conclusion that the waist is 3.6 cm behind the face of the laser, since the total length of the laser is 27.0 cm. By finding the divergence of the laser beam, which explains how the beam diffracts at large distances as the hyperbolic curve approaches a line, we were able to calculate the wavelength of the laser beam. The beam's divergence, theta, is described by the equation: [4] Equation[4] can be used to find the wavelength of the laser beam by using the approximate slope of the curve as the divergence. Using a divergence of 6.568 radians, and a waist size of 299.3 micrometers, we found that the wavelength of the laser was 617.58 nanometers. The error in this calculation is only 2.28 percent, when compared to the theoretical value of the laser, which was 632 nanometers. Conclusion In this project we learned not only about the changing profile and propagation of a laser beam, we also discovered how to determine the length and mirror configuration of the laser cavity. Finally, we learned that careful measurements of the beam profile such as ours can even be used to roughly determine the wavelength of the laser! References [1] Enrique J. Galvez. "Gaussian beams in the optics course." Am. J. Phys. 74, xxx-xxx (2006).
When finding the beam width by the least squares method one has the problem that the theoretical function (integral of a Gaussian) can not be written as a formula and thus cannot be directly compared to the data. The integral in fact defines a special function called the "error function," or erf(x). We dealt with this by numerically integrating the trial Gaussian functions and comparing these numerical integral curves to the data. The numerical integral is computed by simply summing all the Gaussian values up to some particular point x. The result of one such least squares analysis is shown in Figure 4. Figure 4. One of 32 sets of width data with its best-fit erf curve. When we plotted the 32 different beam width values, w(z), we found that the points formed a hyperbola. According to the reference below and others, the formula for the hyperbola is where w0 is the beam width at its minimum value, or "beam waist," zwaist is the distance of the beam waist from the face of the laser, and λ is the wavelength of the laser. A positive zwaist means the waist is in front of the laser's front face. Our results are shown in Figure 5. We found that the waist position was 3.6 cm behind the front face of the laser, which must therefore be where the surface of the output coupler mirror is. We also found w0 = 299.3 microns, which corresponds to a Rayleigh range [1] of 444 mm. Figure 5. Measured and best-fit beam profile. We can determine the length of the laser cavity by finding the beat frequency between the longitudinal modes of the laser. The equation of beat frequency is where c is the speed of light. With help from Vince [link] we found a beat frequency of 685.81 MHz, which corresponds to L = 21.8 cm. This result is in reasonable agreement with our conclusion that the waist is 3.6 cm behind the face of the laser, since the total length of the laser is 27.0 cm. By finding the divergence of the laser beam, which explains how the beam diffracts at large distances as the hyperbolic curve approaches a line, we were able to calculate the wavelength of the laser beam. The beam's divergence, theta, is described by the equation: [4] Equation[4] can be used to find the wavelength of the laser beam by using the approximate slope of the curve as the divergence. Using a divergence of 6.568 radians, and a waist size of 299.3 micrometers, we found that the wavelength of the laser was 617.58 nanometers. The error in this calculation is only 2.28 percent, when compared to the theoretical value of the laser, which was 632 nanometers. Conclusion In this project we learned not only about the changing profile and propagation of a laser beam, we also discovered how to determine the length and mirror configuration of the laser cavity. Finally, we learned that careful measurements of the beam profile such as ours can even be used to roughly determine the wavelength of the laser! References [1] Enrique J. Galvez. "Gaussian beams in the optics course." Am. J. Phys. 74, xxx-xxx (2006).
The theoretical curve given by this integral can be matched to the data points by a least-squares method like we used before. The result is the width w of the laser beam at some particular distance from the laser.



 Ms.Cici
Ms.Cici 
 8618319014500
8618319014500