
Astronomy Soph Quiz 7 Flashcards - the most important advantage of ccds over film is that
Each of the above filters have it's own parameters, following the naming convention of . including a .enable parameter to enable/disable it.
7 inch RoundSealedBeamLEDheadlights
You will need to launch a component container and launch our node as a component together with other component nodes. Further details on "Composing multiple nodes in a single process" can be found here.
For getting a sense of the latency reduction, a frame latency reporter tool is available via a launch file. The launch file loads the wrapper and a frame latency reporter tool component into a single container (so the same process). The tool prints out the frame latency (now - frame.timestamp) per frame.
LEDwaterprooflightsStrip
If user have multiple cameras (might be of the same model) and multiple robots then user can choose to launch/run his nodes on this way.
colorizer: will color the depth image. On the depth topic an RGB image will be published, instead of the 16bit depth values .
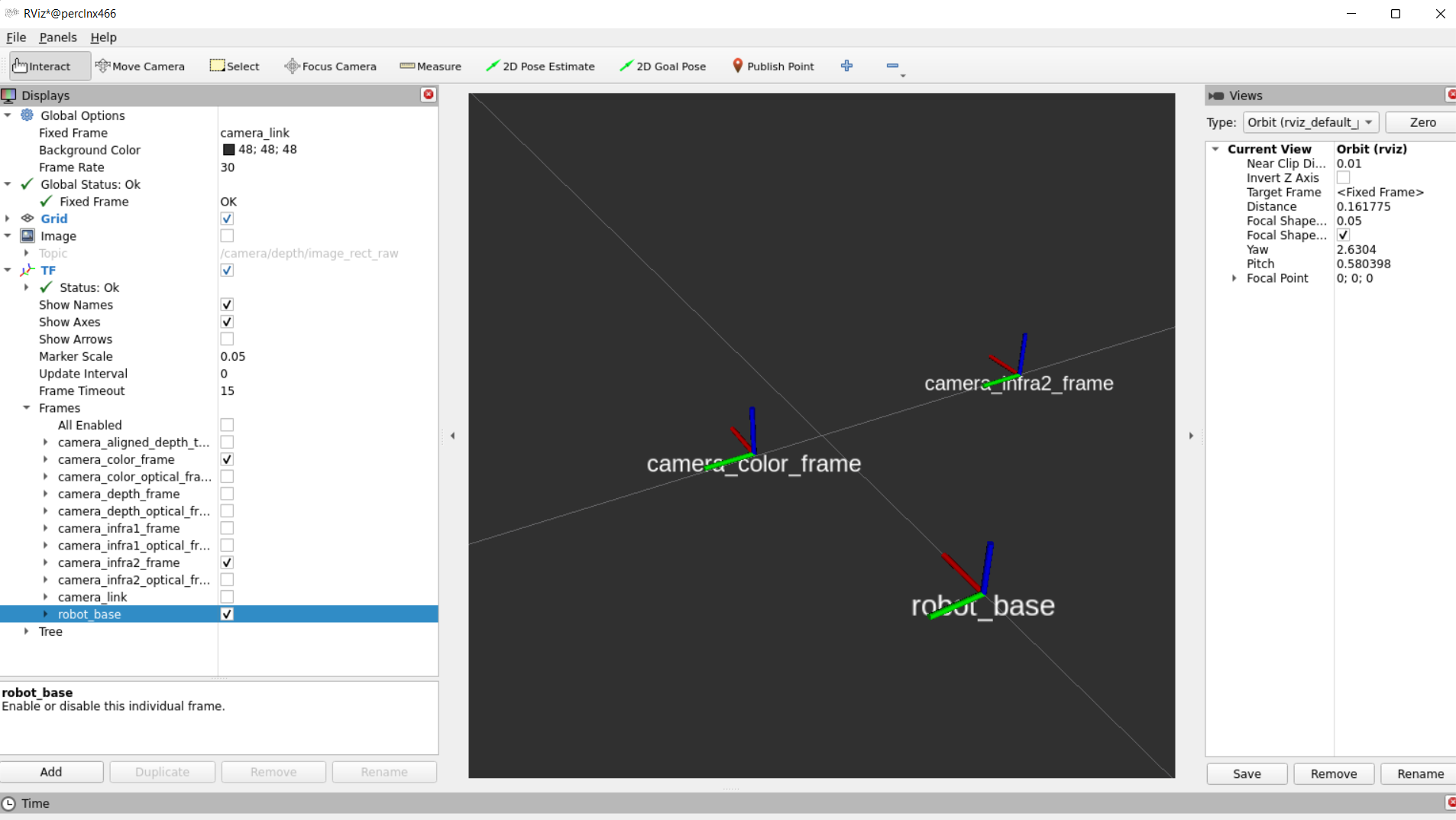
The published topics differ according to the device and parameters. After running the above command with D435i attached, the following list of topics will be available (This is a partial list. For full one type ros2 topic list):
The metadata messages store the camera's available metadata in a json format. To learn more, a dedicated script for echoing a metadata topic in runtime is attached. For instance, use the following command to echo the camera/depth/metadata topic:
Enabling accel and gyro is achieved either by adding the following parameters to the command line: ros2 launch realsense2_camera rs_launch.py pointcloud.enable:=true enable_gyro:=true enable_accel:=true or in runtime using the following commands:
Best outdoor waterproofLED lights
Please choose only one option from the two options below (in order to prevent multiple versions installation and workspace conflicts)
align_depth: If enabled, will publish the depth image aligned to the color image on the topic /camera/camera/aligned_depth_to_color/image_raw.
4x6''sealedbeamledheadlights
This is my second Auxbeam switch and the value cant be beat. The features from RGB display, multiple light modes, and virtually all the hardware that you will need to complete the install are awesome.
WaterproofLED Lightsbattery powered
The launch file accepts a parameter, intra_process_comms, controlling whether zero-copy is turned on or not. Default is on:
WaterproofLED LightsOutdoor
PLEASE PAY ATTENTION: RealSense ROS2 Wrapper is not meant to be supported on Windows by our team, since ROS2 and its packages are still not fully supported over Windows. We added these installation steps below in order to try and make it easier for users who already started working with ROS2 on Windows and want to take advantage of the capabilities of our RealSense cameras
User can set the camera name and camera namespace, to distinguish between cameras and platforms, which helps identifying the right nodes and topics to work with.
The following filters have detailed descriptions in : https://github.com/IntelRealSense/librealsense/blob/master/doc/post-processing-filters.md
Before starting building of our packages, make sure you have OpenCV for Windows installed on your machine. If you choose the Microsoft IOT way to install it, it will be installed automatically. Later, when colcon build, you might need to expose this installation folder by setting CMAKE_PREFIX_PATH, PATH, or OpenCV_DIR environment variables
hdr_merge: Allows depth image to be created by merging the information from 2 consecutive frames, taken with different exposure and gain values.
RGBD new topic, publishing [RGB + Depth] in the same message (see RGBD.msg for reference). For now, works only with depth aligned to color images, as color and depth images are synchronized by frame time tag.

Our ROS2 Wrapper node supports zero-copy communications if loaded in the same process as a subscriber node. This can reduce copy times on image/pointcloud topics, especially with big frame resolutions and high FPS.
Please choose only one option from the 3 options below (in order to prevent multiple versions installation and workspace conflicts)
Bought this and installed it the same day. Unfortunately it wouldn't work. I got in contact with them and to my surprise there was an instant response from them and constant communication!! They told me they think the whole unit was bad and that they would send me a brand new one and said I would get it within 3-7 business days but I got it in the mail same day from the last email response! I swapped everything out and worked perfectly. To say that I am happy with how it works and the customer service with this company is would be an understatement! Highly recommend this product and will definitely be buying more things from them!



 Ms.Cici
Ms.Cici 
 8618319014500
8618319014500